V
主页
【开源】ROS机器人集群的仿真与实践详解八:编队跟随的运动学推导与纯跟踪(Pure Pursuit)算法讲解与仿真实现
发布人
《ROS机器人集群的仿真与实践》编队跟随的运动学推导与纯跟踪(Pure Pursuit)算法讲解与仿真实现 主讲人:田博老师与夏同学 主要内容: 1.编队跟随的运动学推导 2.图解纯跟踪与程序对照 3.跟踪全局规划路径 Global Plan 4.跟踪一条手画路径 Tianbot Mini 驱动 https://github.com/tianbot/tianbot_mini RoboMaster TT 驱动 https://github.com/tianbot/rmtt_ros abc_swarm 多机空地协同 https://github.com/tianbot/abc_swarm 欢迎大家视频一键三连,有问题在评论区留言
打开封面
下载高清视频
观看高清视频
视频下载器
基于ROS的多机器人编队控制仿真(开源)
基于ROS开发的多机器人编队导航系统
【完结】从0制作自主空中机器人 | 开源 | 浙江大学Fast-Lab
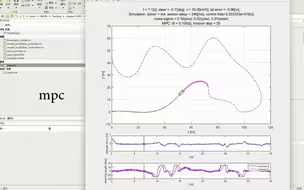
MPC, Pure_Pursuit, PID路径跟踪控制器设计与仿真
【ROS】多车编队
【多智能体编队控制研究】基于领航跟随法(LF)的队形生成与切换——自搭java平台演示
【开源】ROS机器人集群的仿真与实践详解一:多机协同项目abc_swarm讲解支持无人机 多移动机器人轻松组队集群,田博主讲
【Autolabor初级教程】ROS机器人入门
【2021.12.20更新】ROS机器人官方视频教程,从0开发ROS机器人
使用 Pure Pursuit Controller 的车辆路径跟踪
【开源】ROS机器人集群的仿真与实践详解七:规划与控制算法导论
基于领航跟随者(Leader_Follower)、人工势场法等方法的多智能体编队队形协同控制仿真实验演示
【ROS机器人集群的仿真与实践】陆空协同集群套装开箱视频
ROS机器人集群的仿真与实践详解九:多机协同之编队演示与问题解答
ROS机器人集群的仿真与实践-讲科学(AiiSCI)平台 天之博特 田博老师主讲
【开源】ROS机器人集群的仿真与实践详解六:多机导航与阵型的真机演示
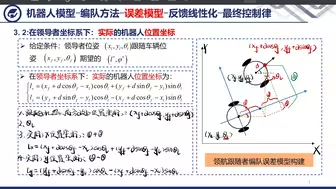
基于反馈线性化控制的机器人编队理论上
【从零开始自动驾驶】13 路径跟随 part 3 pure persuit 纯跟踪
【开源】ROS机器人集群的仿真与实践详解二:ROS无人机机器人空地协同集群与可视化 多机协同项目abc_swarm支持ROS无人机 移动机器人田博主讲
【开源】ROS机器人集群的仿真与实践详解三:ROS入门无人机(RoboMaster TT)使用教程 不止仿真,快速开发几分钟直接起飞 多机协同项目 田博主讲
【开项目】从零开始肝一台ROS机器人需要哪些步骤
手把手教你无人机编队(六):集群逻辑实现6.1 领航跟随法
【番外完整版】ROS机器人集群的仿真与实践详解三:快速实现ROS从入门到开发
纯跟踪算法理论上
群体智能:多机器人编队控制系统
基于人工势场和领航跟随者的多智能体编队协同控制仿真实验效果
基于事件触发的二阶多智能体编队控制动态过程展示
【开源无人机】十机集群,多机器人智能协作,分布式控制
pure_pursuit纯轨迹跟踪算法在F1TENTH仿真赛道中的简单应用
具有避障的分布式编队控制 matlab仿真
【开源】ROS机器人集群的仿真与实践详解五:机器人编队仿真测试
移动跟随机器人 自动跟随机器人 激光雷达避障
【开源】带你体验集群机器人“强化学习”的过程
固定翼无人机等高度分布式编队控制与导航matlab仿真
路径规划与轨迹跟踪系列算法学习_第10讲_纯跟踪法
哪个RoboMaster队伍不想要一个自己的基地呢
基于角度信息的无人车集群自主编队控制-冯如杯
【开源】ROS机器人集群的仿真与实践详解四:多机器人启动协同建图实测 一行代码 两辆车轻松跑起来 开源项目
移动机器人轨迹跟踪控制,运动控制,采用速度规划跟踪直线、贝塞尔曲线
集群系统协同控制理论及飞行器20220901_143040