V
主页
京东 11.11 红包
Science Robotics | 从液体表面张力获得灵感,研发出”能屈能伸”的可变刚度车轮
发布人
韩国的研究团队从液体表面张力获得启发,研发出了一款遇障碍物可软遇平地可像普通轮子的可变刚度车轮,目前,,该团队已将其应用于四轮车辆系统和两轮轮椅系统中,并成功展示了车轮在不同地形中的优越性能 标题:Variable-stiffness–morphing wheel inspired by the surface tension of a liquid droplet 链接:https://www.science.org/doi/10.1126/scirobotics.adl2067
打开封面
下载高清视频
观看高清视频
视频下载器
Science Robotics | 无需外部传感器,通过关节力矩传感技术即可实现"触摸即命令"
浙江大学邹俊/唐威 Science子刊封面:仿生:利用仿生学设计的自适应软体一体化夹持器实现强大的无人机操作能力
机器人顶级期刊T R O创刊至今首篇全华班Best paper诞生。一种利用分布式无人机机队进行快速协作探索的方法RACER获得Best paper。
ICRA'24 | RGBManip:仅基于单目RGB相机的机器人自主环境感知和操纵,实现精准环境感知
突破!《Science Robotics》:机器人触觉传感器的自解耦和超分辨率
Science Robotics 香港城市大学与香港科技大学开发了具有协同混合运动的敏捷单足跳跃四轴飞行器
Nature | 像蜜蜂筑巢一样 多无人机协同进行航空增 材制造,实现高精度3D打印
移动机器人运动规划
IROS'24 普渡大学、麻省理工学院 | 5自由度触觉夹持器,性能匹敌仿生手,实现高效精确操控
MIT Robotics - Neural certificates in large-scale autonomy design
DeepMind训练AI踢足球,技术精湛堪比真人
T-ITS | 秦通团队 Crowd-Sourced NeRF: 基于量产车辆数据集重建3D街景
ICRA 2024 最佳学生论文奖 | NoMaD:基于Transformer用于 导航和探索的目标掩蔽扩散策略
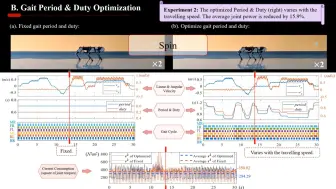
上海交通大学高峰教授团队:六足机器人步态优化框架,让足式机器人像哺乳动物一样行走
Facebook实验室训练AI学习拳击和击剑,身法堪比真人!
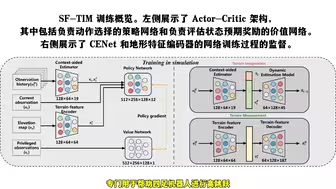
成功部署,敏捷度直接翻倍!浙大提出辅助四足机器人的跳跃新框架SF-TIM,敏捷度直接翻倍
果蝇无人机?用翅膀飞起来的无人机来了!
四旋翼微型无人机,模仿猛禽捕猎,快速精准抓取目标!
NeurlPS'24开源 | RealMotion捕捉时空交互关系,为自动驾驶提供连续、精准的运动预测
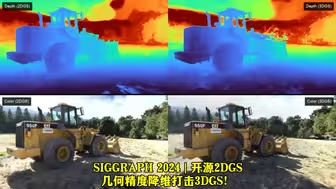
SIGGRAPH 2024 | 上科大开源2DGS!几何精度降维打击3DGS!
Nature | 颠覆传统设计!电动液压肌肉骨骼机器人腿,实现真正意义上的灵活、强适应性的且节能运动!
面向移动机器人的道路环境感知-范睿/同济大学教授
ECCV'24 Oral | 王东林团队提出PiTe:时空对齐视频大模型,增强视频语义理解,提升视频语言模型性能!
移动 ALOHA ,学习低成本全身远程操作的双手移动操作
基于深度学习的三维重建与位姿估计系统设计 | 孙佳明
多模态响应与功能集成,华中科技大学微型磁控胶囊机器人登上《Nature Communications》
技术竞赛与市场重塑:智能驾驶行业的关键一年,”地大华魔的崛起:智驾F4的技术创新与市场扩张”
IROS’24 Oral开源 | CGDenoiser撕破夜幕的噪声迷雾,提升无人机夜间追踪精度
我国科研团队成功破解多旋翼无人机飞行失控难题,利用"被动容灾控制算法"保持安全飞行并实现可控返航
AI在医疗领域的新突破:浙江大学团队提出并成功研制出了AI辅助驾驶气管镜机器人
强化学习训练8小时,AI学会了通关益智解谜游戏
跨智能体模仿学习的机器人连续演化模型-刘星昱/卡内基梅隆大学博士后
ECCV'24 开源 | 6DGS 又快又好,无需迭代的 单图像6D物体位姿估计
特斯拉新发布的机器人已经有点那啥了‼️
融合人与环境的激光雷达三维动态场景感知 | 王程
ICRA'24 | FCMW:"四旋翼无人机的智能失控预警":FCMW助力无人机提升飞行安全性。
重磅出炉!高翔《自动驾驶与机器人中的SLAM技术》新书配套课程发布
ICRA 2024|Lightning NeRF:速度提升10倍!为自动驾驶场景而生
综述:自动驾驶的多智能体强化学习,旨在帮助研究人员整合多智能体强化学习技术
除了华为的自动驾驶系统能通过这20项民间硬核测试之外,还有哪家公司可以?