V
主页
哈佛大学软体机器人工具箱 (Soft Robotics Toolkit):SDM手指教程 (SDM Finger Tutorial)
发布人
这是我的硕导哈佛大学研究院Donal Holland开发和维护的软体机器人工具箱:https://softroboticstoolkit.com/ 我之后会在我的平台持续推出这个网站的所有教学视频~敬请期待~
打开封面
下载高清视频
观看高清视频
视频下载器
哈佛大学软体机器人工具箱介绍
基于有限元方法建模的软体蛇形机器人控制(牛逼版本)
#我们组的连续体机器人#
柔性机构学几个热点研究方向(up主持续更新加强版 建议收藏)
软体蛇形机器人的有限元建模增益调度控制
使用有限元方法仿真对软体机器人的运动建模和操纵控制
软体机器人学习爬行:一个基于有限元模拟的优化框架的设计与控制方法
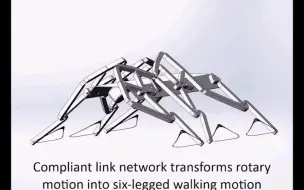
使用SOFA Framework模拟哈佛多步态软体机器人
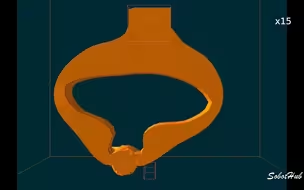
用于适应性干预的仿生活性前列腺模型(医疗软体机器人模拟及应用)
SOFA Framework 软体机器人模拟器 Demo 1
基于有限元法的软体蛇形机器人非线性控制器
用于软机器人中的力和形状估计的基于有限元模型的传感器方法
使用SOFA Framework对软体机器人模拟的总体思路
软体蛇形机器人概念设计性的人机交互尝试
基于有限元模型的蛇形机器人轨迹追踪控制
SOFA Framework 软体机器人建模起步教程
柔顺机构学 Lecture 1 Part 1
#你看过软体机器人玩迷宫游戏么#
基于有限元分析方法的连续体机器人的运动学和闭环控制
国内免翻墙使用chatgpt4.0教程,无需账号,无限次数,安卓手机也可使用。
软体抓手的自动协同设计和抓取控制策略
当魔术遇上软体机器人会发生什么?
基于有限元分析对软体机器人进行几何形状优化
软体机器人基于模型控制处理接触问题(模型实时控制)
基于实时有限元法的弹性软机器人控制(我们课题组元老之作)
超全超简单!一口气刷完CNN、RNN、GAN、GNN、DQN、Transformer、LSTM、DBN等八大深度学习神经网络算法!真的比刷剧还爽!
10分钟!我用这个AI编程神器做了个网站!
浙江工业大学INNO-MATCH EXPO参展产品
基于柔性脊柱的可变形机械手的设计实验与控制
不愧是留学回来的高工,八分钟讲透材料的八大特性!
柔顺机构学 Lecture 9 Part 7
柔顺机构学 Lecture 8 Part 3
【SD教程】自学SD能救一个是一个!这里面的水可深了!人工智能大佬专为零基础研制的StableDiffusion教学教程,太牛了!AI绘图
【科研自救指南】同济大佬手把手教你如何高效阅读文献及笔记整理-SCI论文、顶会论文、文献阅读
多旋翼无人机基于图像的视觉伺服精确拦截飞行目标
柔顺机构学 Lecture 9 Part 1
我的科研工作介绍
柔顺机构学 Lecture 6 Part 4
强到离谱!SCI论文发到手软!中科院博士研究生手把手带你亲历SCI论文从撰写到投稿的全过程【SCI论文写作】
超强动画,一步一步深入浅出解释Transformer原理!这可能是我看到唯一一个用动画讲解Transformer原理的教程!真的通俗易懂!——人工智能、神经网络