V
主页
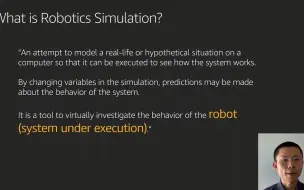
ROS+OpenAI(12)基础8-数据记录与导出
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
ros+openai(5)基础1
ros+openai(3-1)pycharm安装使用
ROS+OpenAI(3-3)基于python3的DQN用于Cube机器人
ROS+OpenAI(10)基础6-ROS时间
ROS+OpenAI(15)ROS-control
ROS+OpenAI(7)基础3-“服务”
ROS+OpenAI(11)基础7-tf2坐标变换与四元数
ROS+OpenAI(8)基础4-动作
ros+openai(3-2)tensorflow1
ros+openai(2)虚拟机演示
乐高-球形机器人
ROS+OpenAI(13)urdf进阶-xacro
1/12 雅马哈 YZF-R1M
ros+openai(4)urdf快速了解
ROS+OpenAI(14)gazebo物理参数
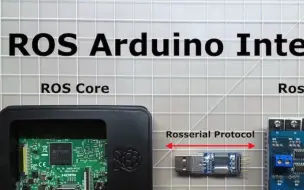
Setting up Arduino lib in ROS & Arduino IDE
ROS多线程 与 Linux进程(1)
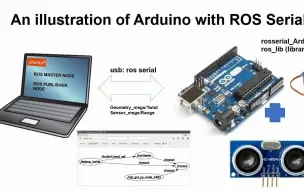
ROS - Arduino serial basics
ROS2 QA 214 How to Install TurtleBot3 packages on ROS2
Dynamixel Tutorial _ How to control the Dynamixel Ax12 Motor using
树莓派 3b ubuntumate 安装 ros
视觉组 | 搓出了第1版使用 ROS2 + YOLO v8 的自瞄
Controlling Dynamixel with ROS_jdIo5hyAST0_1080p
Integration of ROS and Arduino - #1
力矩陀螺 自平衡装置
ROS基础功能讲解-9月13日
C6-2智能车的建图与自主实现教程
用ROS搭建一台自平衡机器人
嵌入式 C++ 急速入坑(1)
【开源无人船】从零组装一艘开源ROS无人船
ROS Arduino serial communication example - Part 1
仅需一步,瞬间提升树莓派5的AI算力,化身性能猛兽!
Simplifying Simulation Worlds Creation for Gazebo with AWS RoboMaker WorldForge
ROS多线程 与 Linux进程(2)
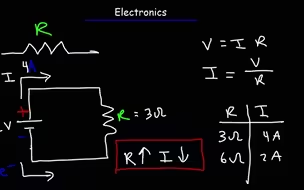
电子基础【小白看】
《松灵ROS 2开讲啦》第六期 Nav2导航应用
ROS Robotics Tutorials _ Robot Operating System
15分钟学完 Arduino 基础
调车总不能炸机了吧(●'◡'●)
10款有趣的机构,肯定能扩展你的想象