V
主页
京东 11.11 红包
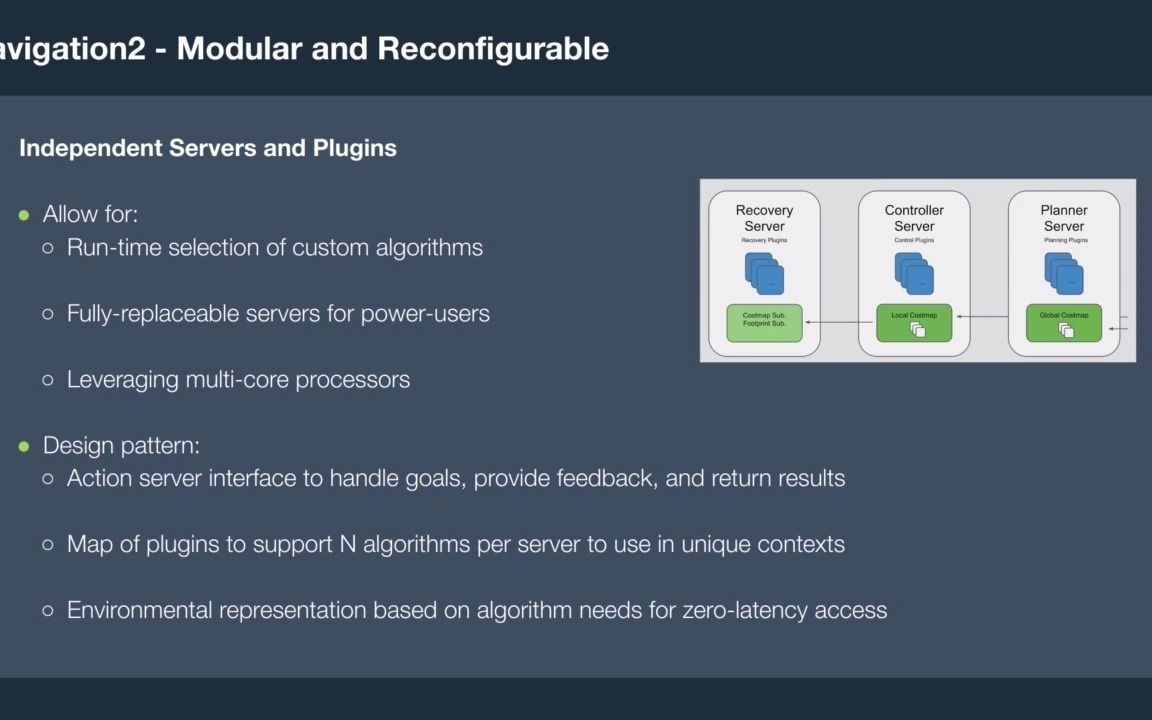
The Marathon 2_ A Navigation System (IROS 2020)
发布人
https://www.youtube.com/watch?v=QB7lOKp3ZDQ
打开封面
下载高清视频
观看高清视频
视频下载器
乐高-球形机器人
Deep Reinforcement Learning and Ultra-Wideband for autonomous navigation in serv
ROS+OpenAI(15)ROS-control
ROS Robotics Tutorials _ Robot Operating System
ros+openai(6)基础2
IROS 2020 机器人姿态控制
ROS2 QA 214 How to Install TurtleBot3 packages on ROS2
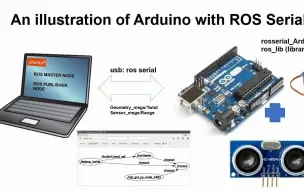
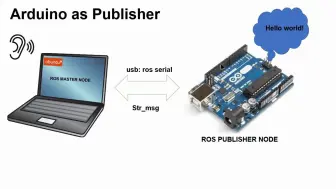
ROS Arduino serial communication example - Part 1
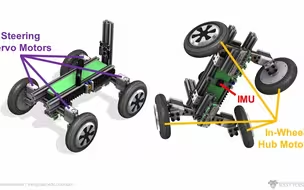
用ROS搭建一台自平衡机器人
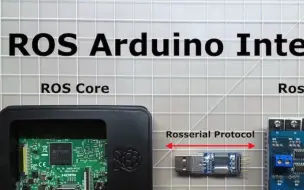
Integration of ROS and Arduino - #1
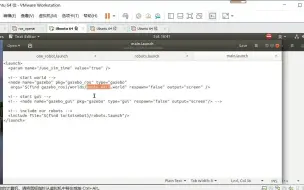
Simplifying Simulation Worlds Creation for Gazebo with AWS RoboMaker WorldForge
Who needs a Real-Time Operating System!
ROS - Arduino serial basics
Introduction to RTOS Part 1 What is a RealTime Operating System RT
ros+openai(5)基础1
The principle of simple mechanisms - animation 2
Setting up Arduino lib in ROS & Arduino IDE
ROS+OPENAI(16)shell的简单使用
ROS Arduino tutorials _ ROS Arduino serial communication example - Part 2
ROS+OPENAI(4-4)多机器人简单示例
做的很棒的几款飞行机器人
自制 Nerf Toy
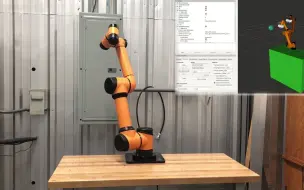
[开源]Moveit ROS Control Robot demo and Code details
ROS+OpenAI(3-3)基于python3的DQN用于Cube机器人
ROS+OpenAI(13)urdf进阶-xacro
树莓派 3b ubuntumate 安装 ros
2020全球最快的7款摩托
ROS2-How to create a ROS2 package in C++ and Python
Olympic Marathon Runner Jared Ward at 5.70 m_s (12.8 mph)
ros+openai(4)urdf快速了解
ROS+OpenAI(7)基础3-“服务”
Dynamixel Tutorial _ How to control the Dynamixel Ax12 Motor using
7款 变形机器人
机械专业的同学 值得一看 很不错的动画
ROS+OpenAI(8)基础4-动作
ros+openai(3-2)tensorflow1
Dynamixel Servos ROS 机械臂
Dynamixel舵机介绍
有趣的机构欣赏
能爬墙的遥控赛车,制作全过程