V
主页
京东 11.11 红包
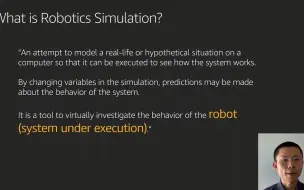
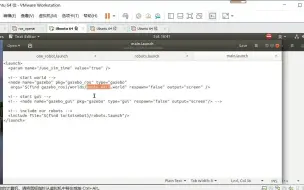
ROS+OpenAI(7)基础3-“服务”
发布人
这一期内容比较基础。谢谢观看!
打开封面
下载高清视频
观看高清视频
视频下载器
ros+openai(5)基础1
ros+openai(3-2)tensorflow1
ROS+OpenAI(8)基础4-动作
ros+openai(3)本地安装
ROS+OpenAI(11)基础7-tf2坐标变换与四元数
ros+openai(3-1)pycharm安装使用
ROS+OpenAI(10)基础6-ROS时间
ROS+OpenAI(9)基础5-树莓派与虚拟机的ROS通信
ROS+OpenAI(3-3)基于python3的DQN用于Cube机器人
ros+openai(2)虚拟机演示
ROS+OpenAI(14)gazebo物理参数
ros+openai(1)简介
The Marathon 2_ A Navigation System (IROS 2020)
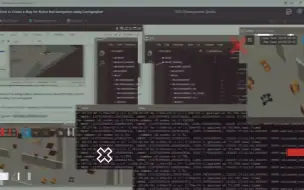
Simplifying Simulation Worlds Creation for Gazebo with AWS RoboMaker WorldForge
ROS2 QA 214 How to Install TurtleBot3 packages on ROS2
ROS+OPENAI(16)shell的简单使用
进化
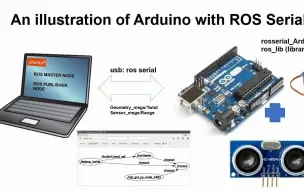
ROS Arduino serial communication example - Part 1
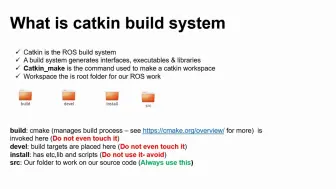
【开源教程】ROS基础例程详解
组装一台3D打印机
树莓派 3b ubuntumate 安装 ros
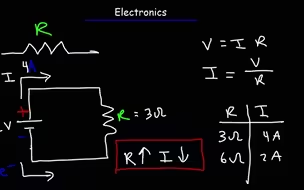
电子基础【小白看】
做的很棒的几款飞行机器人
ROS Robotics Tutorials _ Robot Operating System
理解材料
骑行
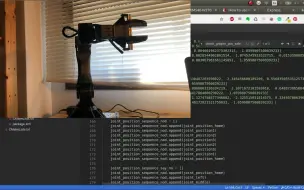
Dynamixel Servos ROS 机械臂
【开源教程】ROS+PX4开源机械臂控制(下)
从价格1美元的魔方到价格100美元的魔方
arduino官方自平衡自行车资料解读(1)套件组成与软件环境安装
ROS+OPENAI(4-4)多机器人简单示例
乐高-球形机器人
ROS多线程 与 Linux进程(1)
Dynamixel Tutorial _ How to control the Dynamixel Ax12 Motor using
【开源无人船】从零组装一艘测绘无人船
ROS2-How to create a ROS2 package in C++ and Python
1/12 雅马哈 YZF-R1M
VR 手
MITs Jammable Robot Manipulator
Creo 极简教程1