V
主页
京东 11.11 红包
粉丝连线答疑1:python编程使用simIK.findconfig回调函数的问题
发布人
要点总结: 1.根据逆解组配置simIK.findconfig()返回逆解组计算出来的一组逆解; 2.ZMQ remoteAPI接口中,使用simIK.simIK.findconfig(callbackfun),这里的回调函数callbackfun主要目的是对自动逆解组处理结果的再次人工处理。因此,可以不使用回调函数的功能,在得到config之后,手动使用程序对config进行处理,效果和使用回调函数是一样的。 注:config,配置。就是一组逆解。6轴就是6个角度,7轴就是7个角度。 3.python是解释型编程语言,C++是编译型语言,对于回调函数,C++用的是函数指针地址,python用的不是地址,而是函数名。 4.RRT:路径规划的一种常用方法,生成的路径是随机的。空间中障碍物越少,路线随机性越强;反之,越弱。 5.粉丝的代码写得很规范,值得学习!
打开封面
下载高清视频
观看高清视频
视频下载器
19B-vrep.coppeliasim.Lua语言基础-简介HelloWorld及4.2闪退问题
基于SMAR公司System302的FF现场总线控制系统组态实例
3-5DH4个参数TheataD
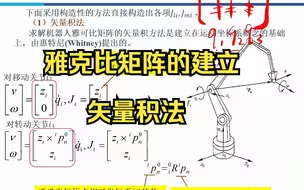
4-6雅克比矩阵的建立-矢量积法
3-7DH4个参数的练习
22-vrep.Coppeliasim计算模块-运动学模块(1)
6-13轨迹规划的Matlab仿真
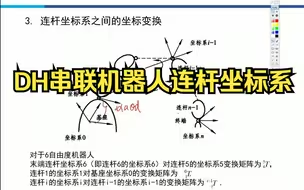
3-8DH串联机器人连杆坐标系
6-10笛卡尔空间轨迹规划和实现思路
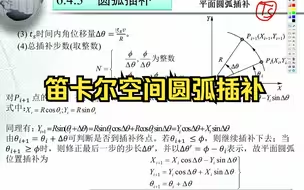
6-12笛卡尔空间圆弧插补
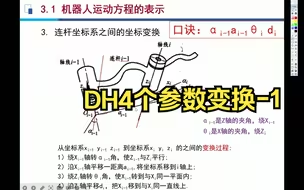
3-6DH法4个参数变换-1
17-vrep.coppeliasim场景对象-Graph
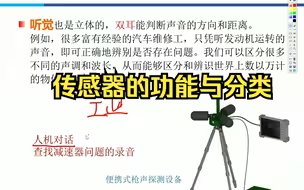
5-2常用环境感知传感器
vrep.coppeliasim函数-getObject获取对象句柄
02-2-vrep.coppeliasim认识模型
2-6其他姿态表示方法
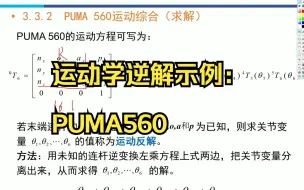
3-12运动学逆解示例:PUMA560
8-1传感器的功能与分类
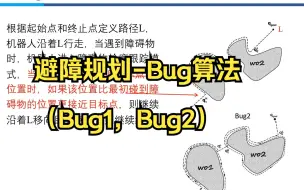
4-19避障规划-Bug算法(Bug1,Bug2)
22-vrep.Coppeliasim计算模块-运动学模块(3)
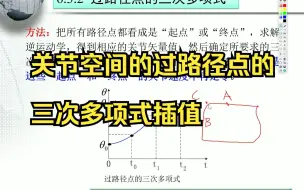
6-5关节空间的过路径点的三次多项式插值
52-Vrep.Coppeliasim Matlab.Vc.Python等API接口二次开发必看
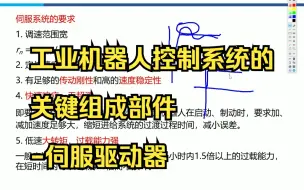
7-7工业机器人控制系统的关键组成部件-伺服驱动器
4-11拓扑连通图构建方法--概率完备(RRT法的改进RRT)
40-Vrep Coppeliasim初识GUI
6-9视觉里程计简介
27-01 Webots节点:旋转关节
3-13Matlab机器人工具箱的使用和DH建模方法回顾
3-16三自由度机器人Matlab机器人工具箱运动学正解robot.fkine
4-35移动机器人平面运动轨迹规划方法-参数优化法
3-26自主移动机器人的可移动度-基于约束分析
实例:vrep.coppeliasim连接真实机器人
奇偶校验CRC校验实例
01-AC800M控制器
10-1vrep.coppeliasim场景对象-形状属性
4-15动力学分析方法-拉格朗日方法
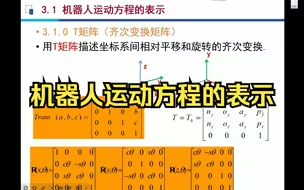
3-2机器人运动方程的表示
DCS工程实施及ABB Freelance CBF AC800F仿真实例
7-1机器人控制系统的特点及控制方式
6-4里程估计方法-基于电机码盘