V
主页
4-35移动机器人平面运动轨迹规划方法-参数优化法
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
【深大RobotPilots】招新P2:R(yuan)P(shen),启动!
具身智能!轨迹规划入门
4-3路径规划
4-15最优路径搜索算法-Dijkstra算法
4-13最优路径搜索算法-深度优先法
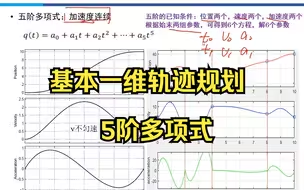
4-27基本一维轨迹规划-5阶
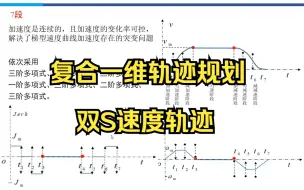
4-30复合一维轨迹规划-双S速度轨迹
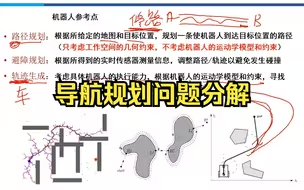
4-2导航规划问题分解
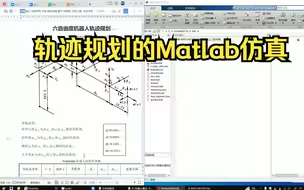
6-13轨迹规划的Matlab仿真
Qt/C++ opengl导入机械臂模型,添加ui拖拽交互,运动插补,包括关节和直线运动,可保存关节点信息
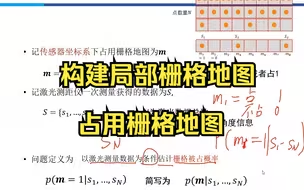
5-9构建局部栅格地图-占用栅格地图
4-11拓扑连通图构建方法--概率完备(RRT法的改进RRT)
vrep.Coppeliasim的Dummy模拟吸盘实现机器人抓取物体
3-29移动机器人的完整性
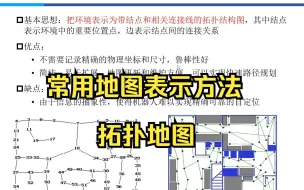
5-6常用地图表示方法-拓扑地图
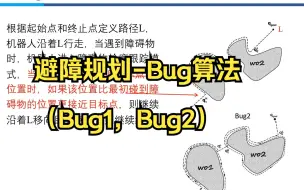
4-19避障规划-Bug算法(Bug1,Bug2)
1-7移动机器人的关键性能指标
5-2常用环境感知传感器
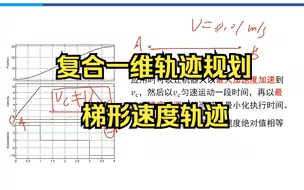
4-29复合一维轨迹规划-梯形速度轨迹
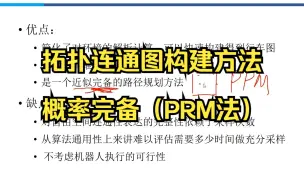
4-9拓扑连通图构建方法--概率完备(PRM法)
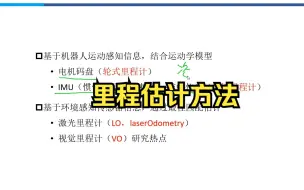
6-3里程估计方法
7-4工业机器人控制系统方案-基于运动控制卡
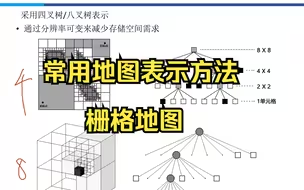
5-4常用地图表示方法-栅格地图
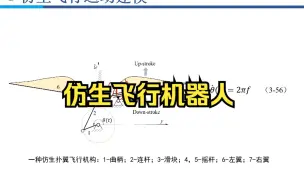
3-32仿生飞行机器人
6-4里程估计方法-基于电机码盘
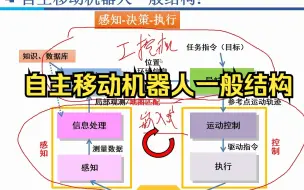
1-9自主移动机器人一般结构
4-1移动机器人导航规划
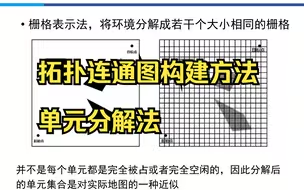
4-7拓扑连通图构建方法-单元分解法
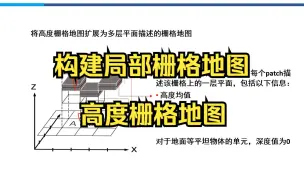
5-10构建局部栅格地图-高度栅格地图
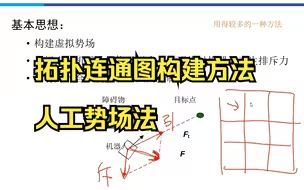
4-8拓扑连通图构建方法-人工势场法
vrep.Coppeliasim机器人工作区域显示
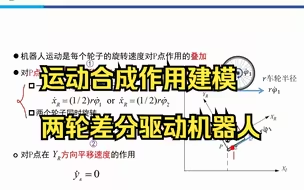
3-5自主移动机器人-运动合成作用建模-两轮差分驱动机器人
4-4工作空间与位形空间
3-4自主移动机器人-轮式移动机器人运动学建模主要方法及分析假设条件
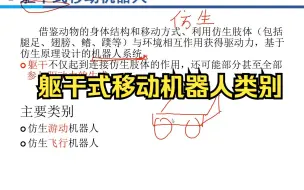
3-30躯干式移动机器人类别
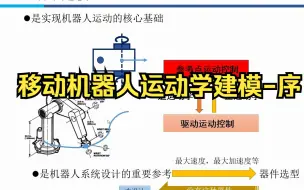
3-1移动机器人运动学建模-序
3-2自主移动机器人-轮子的类型
3-7运动合成作用建模-四轮差动底盘(机器人)
多个机器人使用相同的控制器程序
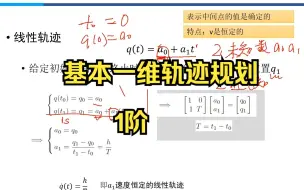
4-24基本一维轨迹规划-1阶