V
主页
京东 11.11 红包
基于SMAR公司System302的FF现场总线控制系统组态实例
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
现场总线控制系统FCS FF是个啥
分散控制系统DCS是个啥
7-1机器人控制系统的特点及控制方式
DCS工程实施及ABB Freelance CBF AC800F仿真实例
7-5工业机器人控制系统方案-基于PC
7-3工业机器人控制系统方案-基于PLC
技术实例-外部机器人模型导入Coppeliasim(由模型生成关节)
10-DCS组态软件的功能分类
7-8工业机器人控制系统的关键组成部件-示教器及其他
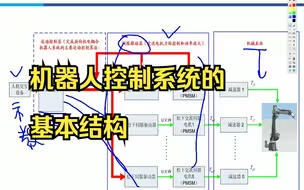
7-2机器人控制系统的基本结构
PID算法的实现
10分钟深度了解4-20mA信号
7-7工业机器人控制系统的关键组成部件-伺服驱动器
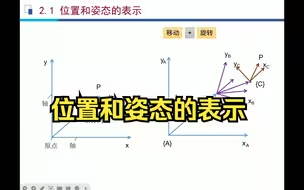
2-1位置和姿态的表示
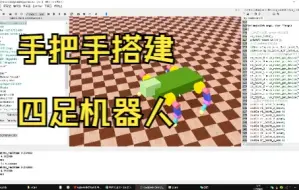
实例 手把手搭建Webots四足机器人(机器狗)
20分钟了解计算机总线发展史
工业机器人组成
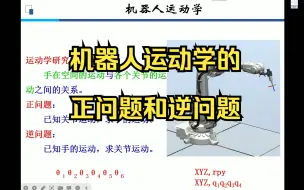
3-1正问题和逆问题
PID控制原理及simulink仿真
实例:路径Path和系统自带循迹小车运动学仿真及关键脚本解读
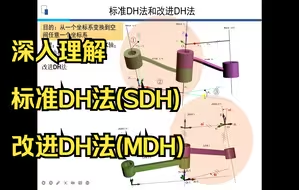
深入理解标准DH法(SDH)和改进DH法(MDH)
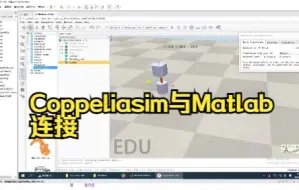
55-Coppeliasim与Matlab连接
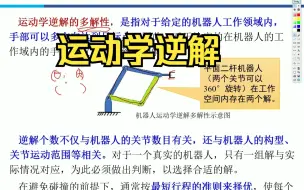
3-11运动学逆解
实例 vrep.coppeliasim4轮差动小车控制
实例:Coppeliasim和Arduino混合仿真(数字孪生)
2-初识机器人工具箱
实例 Webots手把手搭建四旋翼无人机
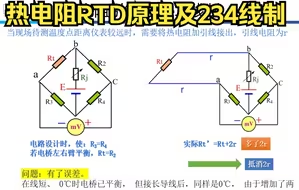
热电阻RTD原理及234线制
工控机介绍
实例:vrep.coppeliasim连接真实机器人
3-19六自由度机器人Matlab机器人工具箱建模
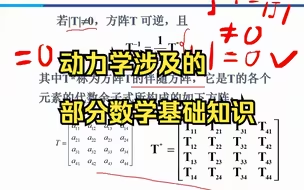
4-0动力学涉及的部分数学基础知识
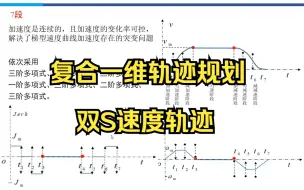
4-30复合一维轨迹规划-双S速度轨迹
2-00软件定义
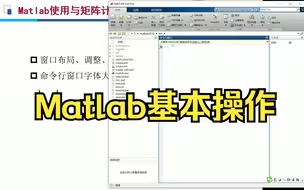
2-Matlab基本操作
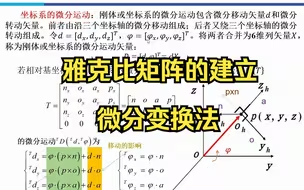
4-7雅克比矩阵的建立-微分变换法
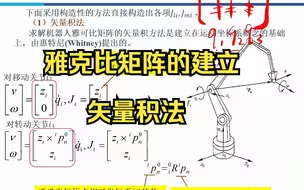
4-6雅克比矩阵的建立-矢量积法
2-2坐标变换
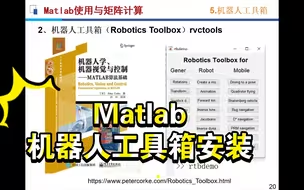
matlab机器人工具箱安装
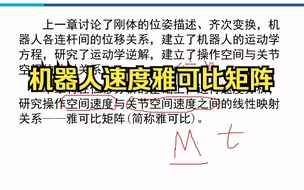
4-1机器人速度雅可比矩阵