V
主页
京东 11.11 红包
2-6其他姿态表示方法
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
2-1位置和姿态的表示
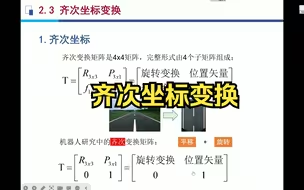
2-3齐次坐标变换
2-2坐标变换
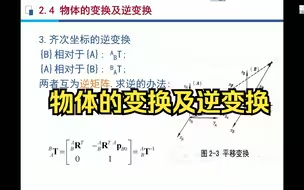
2-4物体的变换及逆变换
2-5通用旋转变换
3-7DH4个参数的练习
4-10机器人的静力分析
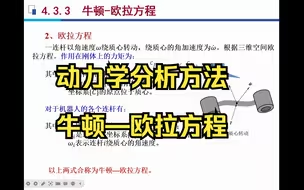
4-14动力学分析方法-牛顿—欧拉方程
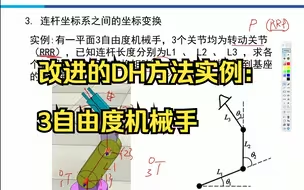
3-9改进的DH方法实例:3自由度机械手
6-6关节空间的高阶多项式插值
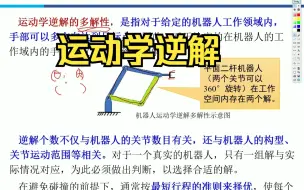
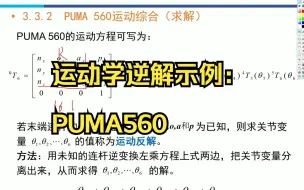
3-11运动学逆解
6-3关节空间的轨迹规划
6-4关节空间的三次多项式插值
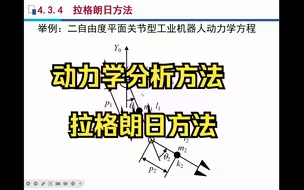
4-15动力学分析方法-拉格朗日方法
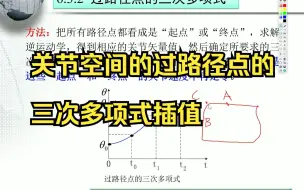
6-5关节空间的过路径点的三次多项式插值
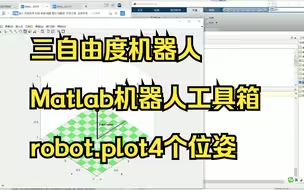
3-15三自由度机器人Matlab机器人工具箱robot.plot4个位姿
4-12刚体的转动惯量
3-17三自由度机器人Matlab机器人工具箱运动学jtraj关节空间规划及subplot二维曲线
3-21六自由度机器人Matlab机器人工具箱运动学正解robot.fkine
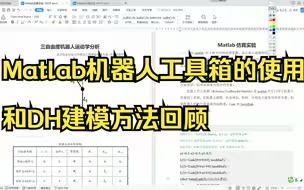
3-13Matlab机器人工具箱的使用和DH建模方法回顾
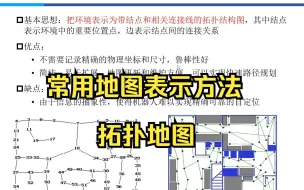
5-6常用地图表示方法-拓扑地图
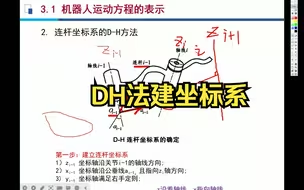
3-3DH法建坐标系
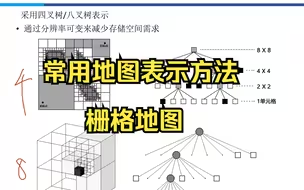
5-4常用地图表示方法-栅格地图
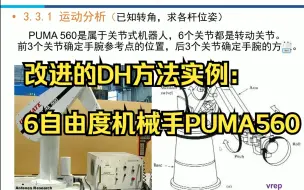
3-10改进的DH方法实例:6自由度机械手PUMA560
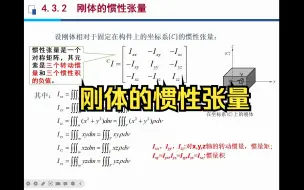
4-13刚体的惯性张量
3-12运动学逆解示例:PUMA560
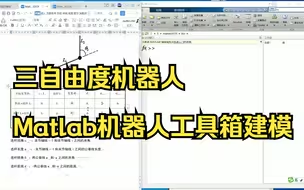
3-14三自由度机器人Matlab机器人工具箱建模
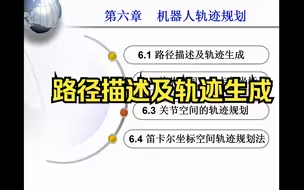
6-1路径描述及轨迹生成
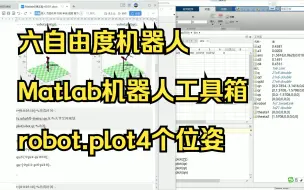
3-20六自由度机器人Matlab机器人工具箱robot.plot4个位姿
3-16三自由度机器人Matlab机器人工具箱运动学正解robot.fkine
3-22六自由度机器人Matlab机器人工具箱运动学逆解robot.ikine及其他
4-18避障规划
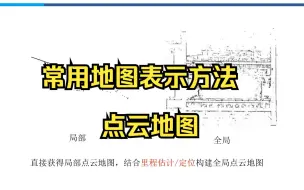
5-3常用地图表示方法-点云地图
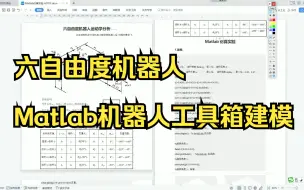
3-19六自由度机器人Matlab机器人工具箱建模
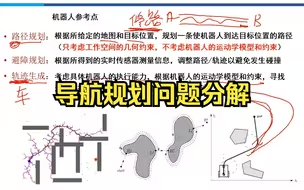
4-2导航规划问题分解
4-12最优路径搜索算法
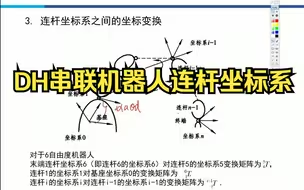
3-8DH串联机器人连杆坐标系
3-1正问题和逆问题
4-3路径规划
2-00软件定义