V
主页
京东 11.11 红包
使用coppeliasim学习dh算法
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
[AI生成]易♂建♂联:我们只是在练功。
机械手爬行
vrep.Coppeliasim的Dummy模拟吸盘实现机器人抓取物体
这样的仿真机器人多少钱买🥹
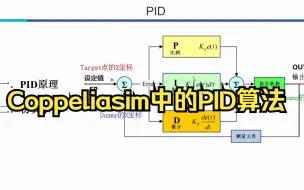
Coppeliasim中的PID算法
实例:vrep.coppeliasim连接真实机器人
4-20使用Coppeliasim实现Bug2算法的例子
高中生秀黑客技术,让全班同学膜拜!行内人已笑尿,真正的黑客应该掌握这六点!(网络安全/信息安全)
vrep.Coppeliasim机器人工作区域显示
11-1vrep.coppeliasim场景对象-初识关节
实例:vrep.coppeliasim四足机器人机器狗仿真实例
串联机器人中的关节
Object is model base的补充说明
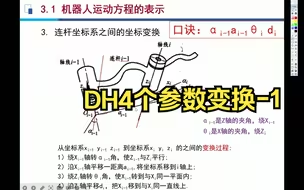
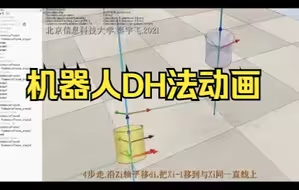
3-6DH法4个参数变换-1
机器人dh法动画
15-vrep.coppeliasim场景对象-力传感器
3-7自主移动机器人-运动合成作用建模-四轮差动底盘(机器人)的仿真实例vrep.coppeliasim
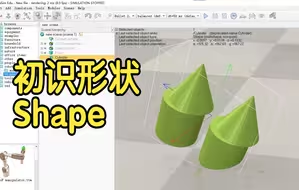
10-vrep.coppeliasim场景对象-初识形状Shape
众擎——旗舰级ENGINEAI SE01人形智能体
4-13最优路径搜索算法-深度优先法
responsible属性掩码详解及由此导致的抖动和关节错位
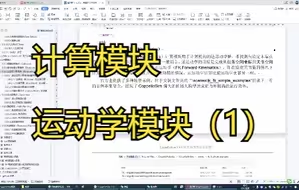
22-vrep.Coppeliasim计算模块-运动学模块(1)
3-1DH法的目标
3.机器人的定义
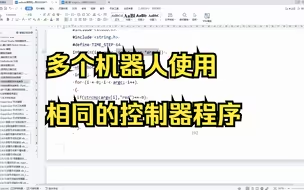
多个机器人使用相同的控制器程序
vrep.coppeliasim西班牙Leopoldo老师并联机器人仿真分析
独属于男人的专属浪漫
13-vrep.coppeliasim场景对象-接近觉传感器
Arduino导弹防御雷达系统教程
技术实例-外部机器人模型导入Coppeliasim(由模型生成关节)
3-9自主移动机器人-运动合成作用建模-三轮全向底盘(机器人)的仿真实例vrep.coppeliasim
8-4传感器-旋转变压器
硬核+开源 稚晖君Dummy机械臂全新升级谐波无刷电机版 - Dummy2 它来了!😄
02-2vrep.coppeliasim视图操作
4-15最优路径搜索算法-Dijkstra算法
vrep.coppeliasim四旋翼无人机脚本解读
粉丝答疑:vrep.coppeliasim关节力矩的设置
32-Vrep Coppeliasim线程与非线程子脚本的区别
一个动画讲清楚:大模型思维链复杂度的底层逻辑
10-3vrep.coppeliasim场景对象-形状编辑