V
主页
京东 11.11 红包
【ICRA2021】快速高效地探索大型复杂环境
发布人
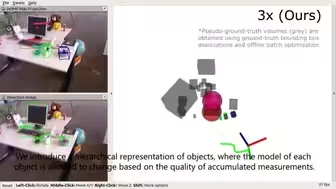
本文描述了一种用于大型复杂环境下自主探索的新框架。我们证明了该框架是有效的,因为它的层次结构,在一个层次上它保持了环境的稀疏表示,在另一个层次上,在机器人周围的局部规划范围内使用了密集表示。探索路径在两个层次上计算,粗略地在全球范围内计算,精细地在机器人周围计算。这样的框架在机器人附近产生详细的路径,而在远离机器人的地方牺牲数据分辨率以提高计算效率。在实验中,我们评估了我们的方法与一个真实的机器人探索大型和复杂的室内和室外环境。结果表明,与最先进的方法相比,我们的方法在覆盖空间的效率是现有方法的
打开封面
下载高清视频
观看高清视频
视频下载器
【ICRA2021】VOLDOR+SLAM:当基于功能或直接的方法还不够好的时候
【ICRA2021】移动机器人 3D 三角形网格上的连续最短路径矢量场导航
【ICRA2021】高效鲁棒导航的分层目标地图估计
【ICRA2021】直接稀疏双目视觉-惯性全局里程计
【ICRA2021】UVIP:用于复杂室内环境的强大的 UWB 辅助视觉惯性定位系统
【ICRA2021】动能缓冲器避障
【ICRA2021】CAROM - 道路基础设施单目相机的车辆定位和交通场景重建
【ICRA2021】3997-闭塞和不确定环境下安全自主导航的可视性谈判
【ICRA2021】4028-移动机器人全局-局部耦合两阶段路径规划方法
【ICRA2021】3767-通过增量采样和概率路线图对动态环境进行自主UAV探索
【ICRA2021】未探索语义环境中移动操作任务的反应式规划
【ICRA2021】基于图的大规模三维环境拓扑勘探规划
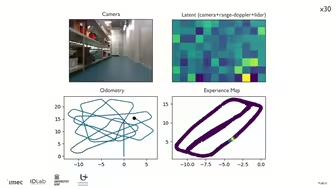
【ICRA2021】LatentSLAM:用于定位和建图的无监督多传感器表示学习
【ICRA2021】使用快速可见树的实时机器人路径规划
【ICRA2021】基于递归神经网络的动态占用栅格地图
【ICRA2021】分层驾驶模型的模仿学习:从连续意图到连续轨迹
【ICRA2021】LiDAR和相机的基于线的自动外部校准
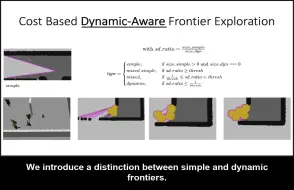
【ICRA2021】人口密集环境中的动态感知自主探索
【ICRA2021】机器人导航的主动模块化环境
【ICRA2021】稳健 RGB-D SLAM 系统的多参数优化
【ICRA2021】3988-大尺度环境严重里程计漂移下自主体积探测的统一方法
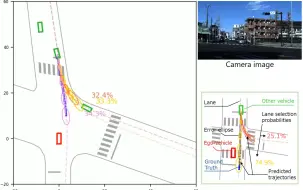
【ICRA2020】利用车辆和车道之间的几何关系进行城市环境的多模态轨迹预测
【ICRA2021】4081-一种集成波束形成映射的FastSLAM方法用于基于超声波的金属结构机器人检测
【ICRA2021】具有在线校准功能的高效多传感器辅助惯性导航
【ICRA2021】3505-MOLTR:单目RGB视频的多目标定位、跟踪和重建
【ICRA2021】中国商店中的机器人:使用强化学习实现特定位置的导航行为
【ICRA2021】S3Net:3D LiDAR 稀疏语义分割网络
【ICRA2021】稀疏噪声点云中的导航空间构建
【ICRA2021】3479-多智能体环境中的实例感知预测导航
【ICRA2021】自动驾驶汽车的轻量级语义网格建图
【ICRA2021】3485-R-LOAM:利用已知三维参考对象的点到网格特征改进激光雷达里程计建图
1-3 视觉SLAM的数学描述
【ICRA2021】连接语义建筑信息模型和机器人:基于2D LiDAR的定位应用
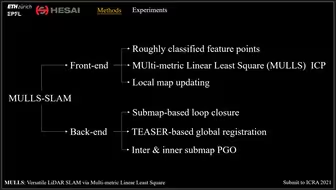
【ICRA2021】MULLS:多度量线性最小二乘法的多功能激光雷达SLAM
【ICRA2021】YOLOStereo3D:回归2D,实现高效立体3D检测
【ICRA2021】用于自动代客泊车的基于混合鸟瞰边缘的语义视觉 SLAM
【ICRA2021】单目直接视觉里程计中基于特征的重定位的紧密集成
【ICRA2021】LVI-SAM:紧耦合的激光雷达-视觉-惯性里程测量,通过平滑和建图
【ICRA2021】3745-SD DefSLAM:用于可变形和体内场景的半直接单目SLAM
【ICRA2021】3664-LoLa SLAM:使用连续扫描切片的低延迟激光雷达SLAM