V
主页
【ICRA2021】动能缓冲器避障
发布人
本文介绍了动能差 (KED) 作为碰撞接近度的度量。解释了差分驱动机器人的 KED 计算,以及使用它的避障算法示例。该示例算法的计算效率很高,仿真表明它能够引导动态缓慢的机器人通过狭窄的走廊。
打开封面
下载高清视频
观看高清视频
视频下载器
【ICRA2021】3475-OV2SLAM:用于实时应用的完全在线和通用的视觉SLAM
【ICRA2021】移动机器人 3D 三角形网格上的连续最短路径矢量场导航
【ICRA2021】3508-ERASOR:一种基于栅格占据情况之差异的动态物体过滤方法
【ICRA2021】用于自动代客泊车的基于混合鸟瞰边缘的语义视觉 SLAM
【ICRA2021】使用快速可见树的实时机器人路径规划
5-1 特征点提取与匹配
【ICRA2021】快速高效地探索大型复杂环境
Go2开发教学10-SLAM 导航服务接口
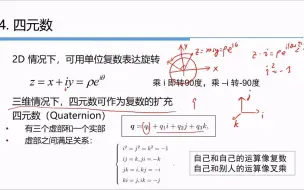
2-4 四元数
【ICRA2021】自动驾驶汽车的轻量级语义网格建图
【ICRA2021】基于实时3d激光雷达、毫米波雷达和GPS/IMU融合的非结构化环境下车辆检测与跟踪
【ICRA2021】3566-决策算法评估的多模态安全关键场景生成
开车用手机导航,记得打开这5个设置,能让你少走很多冤枉路
【ICRA2021】基于递归神经网络的动态占用栅格地图
【ICRA2021】3853-通过幻觉学习和清醒部署的敏捷机器人导航
【ICRA2021】LIRO:紧耦合激光雷达惯性里程计
【ICRA2021】3516-BADGR:一种基于自主自我监督学习的导航系统
【ICRA2021】高效且强大的基于 LiDAR 的端到端导航
【ICRA2021】3794-学习使用各种LiDAR配置进行无地图导航:一种基于支持点的方法
【ICRA2021】3531-在未知环境中学习和规划临时扩展任务
【ICRA2021】LiDAR和相机的基于线的自动外部校准
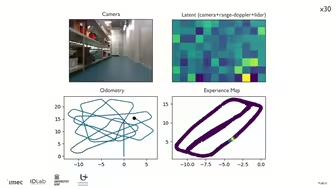
【ICRA2021】LatentSLAM:用于定位和建图的无监督多传感器表示学习
3D建图小能手
【ICRA2021】相机IMU UWB的距离聚焦融合用于精确和减少漂移的定位
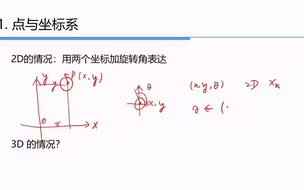
2-1 点与坐标系
【ICRA2021】用于自动驾驶汽车的基于 SRIF 的鲁棒 LiDAR-IMU 定位
SLAM-无人驾驶、VR/AR
【ICRA2021】3602-移动机器人导航的终身学习方法
【ICRA2021】3647-使用相对深度先验的偏振单目稠密建图
【ICRA2021】里程计辅助视觉惯性 SLAM 的双向轨迹计算
进入高速隧道前导航提示前方匝道限速80跟前,很少见到啊
【ICRA2021】具有多模态感知不确定性的动态环境中的自主导航
利用大语言模型增强机器人导航(ReMEmbR)
港大ArcLab重磅开源LVI-GS:3DGS紧耦合LiDAR-视觉-惯性SLAM!实时照片级建图!
3-1 群
在isaaclab中开发viplanner端到端导航
【ICRA2021】半动态环境中的终身定位
【ICRA2021】机器人导航的主动模块化环境
基于NVIDIA Isaac Sim和LIO-SAM的激光SLAM demo
小小的调试一下