V
主页
京东 11.11 红包
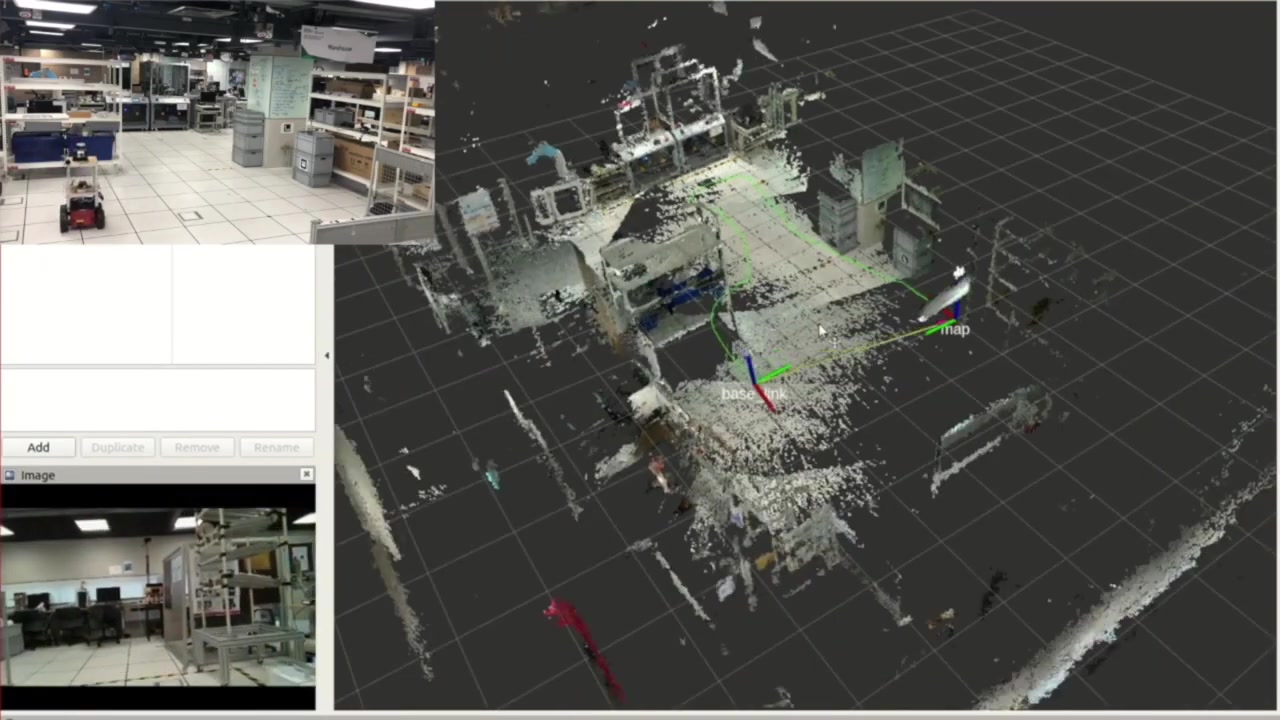
【ICRA2021】固态激光雷达的轻型三维定位和建图
发布人
由于其在同时定位和地图(SLAM)中的重要作用,激光雷达(LiDAR)传感器已成为最重要的感知设备之一。现有的SLAM方法主要针对大型机器人经常采用的机械式激光雷达传感器开发。最近,固态激光雷达被引入并受到欢迎,因为它为小型机器人提供了一种成本效益高、重量轻的解决方案。与机械LiDAR相比,固态LiDAR传感器具有更高的更新频率和角分辨率,但也具有更小的视场(FoV),这对于现有的LiDAR SLAM算法来说非常具有挑战性。github.com/wh200720041/SSL_SLAM
打开封面
下载高清视频
观看高清视频
视频下载器
【ICRA2021】3475-OV2SLAM:用于实时应用的完全在线和通用的视觉SLAM
【ICRA2021】VOLDOR+SLAM:当基于功能或直接的方法还不够好的时候
【ICRA2021】相机IMU UWB的距离聚焦融合用于精确和减少漂移的定位
【ICRA2021】紧密耦合激光雷达视觉惯性里程表的统一多模态地标跟踪
【ICRA2021】自动驾驶汽车的轻量级语义网格建图
【ICRA2021】LIRO:紧耦合激光雷达惯性里程计
【ICRA2021】3664-LoLa SLAM:使用连续扫描切片的低延迟激光雷达SLAM
【ICRA2021】3731-用于大规模勘探任务的弹性高效激光雷达重建
【ICRA2021】LVI-SAM:紧耦合的激光雷达-视觉-惯性里程测量,通过平滑和建图
【ICRA2021】3518-在不利环境条件下使用轻型、低成本毫米波雷达导航的表示的跨模态对比学习
【ICRA2021】基于实时3d激光雷达、毫米波雷达和GPS/IMU融合的非结构化环境下车辆检测与跟踪
【ICRA2021】稀疏噪声点云中的导航空间构建
【ICRA2021】PSF-LO:基于参数化语义特征的激光雷达里程计
【ICRA2021】3647-使用相对深度先验的偏振单目稠密建图
【ICRA2021】半动态环境中的终身定位
【ICRA2021】基于线段的激光雷达-单目联合曲面重建
【ICRA2021】移动机器人 3D 三角形网格上的连续最短路径矢量场导航
1-2 SLAM是什么
【镭神智能】雷祖芳《激光雷达及其感知、定位导航应用》
【ICRA2021】单目直接视觉里程计中基于特征的重定位的紧密集成
【ICRA2021】自动驾驶和地图学习的定制地标表示的自动建图
【ICRA2021】LiTAMIN2:基于超轻激光雷达的SLAM,使用几何近似和KL-Divergence
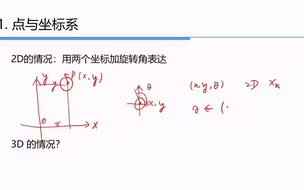
2-1 点与坐标系
1-4 Linux下的C++基础
【ICRA2021】3672-基于多分辨率边界的自主三维勘探规划器
【ICRA2021】TT-SLAM:用于平面环境的密集单目 SLAM
【ICRA2020】变化的城市场景下激光雷达惯性里程计辅助的鲁棒激光雷达定位系统
【ICRA2021】3732-RigidFusion:大型动态刚体环境中的机器人SLAM
火星上的SLAM 非结构环境中的飞行器建图和定位 太空机器人
【ICRA2021】4081-一种集成波束形成映射的FastSLAM方法用于基于超声波的金属结构机器人检测
【ICRA2021】Panoster:激光雷达点云的端到端全景分割
【ICRA2021】CAROM - 道路基础设施单目相机的车辆定位和交通场景重建
基于先验地图的通用激光雷达定位框架
【ICRA2021】CamVox:低成本且准确的激光雷达辅助视觉 SLAM 系统
【ICRA2021】HyperMap:单目相机注册的压缩3D地图
动态环境中并行轨迹优化
【ICRA2021】直接稀疏双目视觉-惯性全局里程计
【ICRA2021】4082-基于观测约束的检索与定位
【ICRA2021】S3Net:3D LiDAR 稀疏语义分割网络
【ICRA2021】3616-UPSLAM:全景SLAM联盟