V
主页
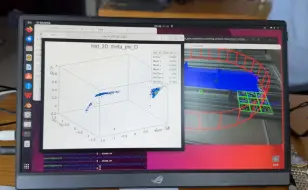
使用3D ROI搭配ICP进行目标物体的3D位姿估计
发布人
使用Realsense D435,依靠ArUco建立3D ROI(感兴趣区域),进而从场景中粗略分割出目标物体,再使用ICP(迭代最近点)方法对目标物体进行位置和姿态估计。本工作以自动焊接为背景,以纸箱模拟待焊接工件,以纸箱的边模拟焊缝,实现了对焊缝的定位。但本工作的问题是:对工件的识别准确率较低、焊缝定位精度较低。
打开封面
下载高清视频
观看高清视频
视频下载器
26岁小姑娘手淫九年,舌苔剥落不说,还天天挖喷泉!
3D视觉机器人的手眼标定流程记录
点云配准的ICP算法测试
在“多机器人-多资源-多任务”场景下资源分配问题的构建方法
雷达车充气假目标,军事仿真模型,工厂产品充气测试
使用PCL(Point Cloud Library)生成点云和保存PCD点云文件
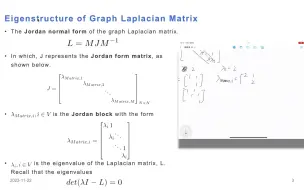
多智能体系统一致性介绍-1-代数图论基础
使用3D视觉机器人完成无序抓取的调查报告
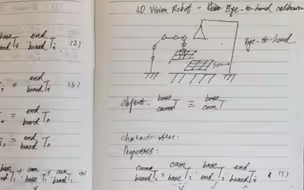
2D视觉机器人的手眼标定流程记录
Nabla算符的理解记录
采用两次ICP进行7自由度(位移、旋转、缩放)的3D物体识别
瓦尔拉斯需求函数的求解记录
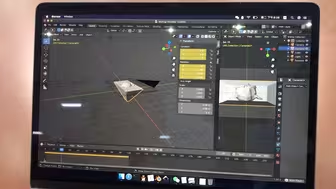
机器人集群的模拟软件初版搭建完成,能够模拟多机器人、多目标的场景,进行机器人集群的任务分配、路径规划,并且可以进行数据导出和后处理。这里用blender做了一…
使用PCL(Point Cloud Library)进行点云的法线估计
blender基于软体物理骨骼的效果优化,更加合理的软体效果
依靠3D的ROI对场景点云进行筛选
在类霍夫变换中使用类DBSCAN进行多个平面的提取
在轴角集合中使用类高斯滤波稳定ArUco二维码的3D位姿
手眼标定自动化的流程思考和讨论
在C:MO兵棋推演游戏背景下的单装备多目标打击问题-方法1-问题构造
最强移除物体工作流史诗级更新
多智能体系统一致性基础-11-一阶时间离散动力系统的一致性2
使用realsense D435识别ArUco二维码并且放一个立方体上去
TeXShop操作流程记录
使用3D相机对定位精度指标进行自动数据采集和评估
多靶位八刀连飞速投,近距离多目标追击!
【25考研】最后30天!记住:做真题已经提高不了成绩了...
东风26导弹发射车1:1仿真充气靶标假目标演习训练道具,工厂实测充气,抗风7级,方便运输和搭建,可在短时间搭建一个导弹基地
多智能体系统一致性基础-4-图矩阵基础2
多智能体系统一致性基础-3-图矩阵基础
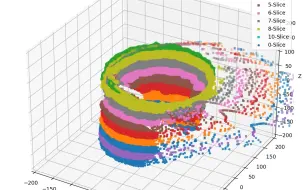
采用3D深度相机和切片方法测量人体体积
Blender创建动漫风格,风吹草效果!
小型室内机器人调度系统介绍-1-背景和目标
多智能体系统一致性基础-8-单积分器动力学的一致性2-Consensus Leaders and the Kronecker product
在C:MO兵棋推演游戏背景下的多装备多目标打击问题-方法1
排查圆柱体ROI对点云分割的BUG
裸眼3D,纯享
使用类霍夫变换的统计方法在3D点云中进行多个平面的法线估计
一点想法-观测与事实
FLIR手持3D视觉相机