V
主页
Experiment: r2live隧道测试(退化)
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
Experiment: LIO+wheelspeed tightly coupled隧道测试
多普勒d-icp:退化场景下实现icp配准
【动态环境建图】RH-Map: Online Map Construction Framework of Dynamic Object Removal
SC-DLO:给高精度轻量级的 DLO 纯激光里程计 Odometry 加上个回环
CU-Astro自主探索无人机室内外飞行演示:3.5寸紧凑型 (cuhk-usr-group)
赛尔最近出了一款风声很大的手持激光扫描仪,今天我们一起测试下赛尔SLAM S10的RTK精度如何吧?#三维激光扫描仪 #SLAM
【SLAM】【VIO】双目视觉+超强三维感知力【室内复杂空间内——同步定位.建图.导航】“实测”
GPS丢失情况下无人机定位-VIO+VPS
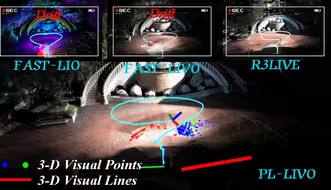
Point-line LIVO Using Patch-Based Gradient Optimization for Degenerate Scenes
Fast-LIO2室内建图定位——RS32线雷达
基于深度学习特征的长期视觉定位框架
【SLAM】【VIO】双目视觉+超强大的三维感知能力【应用场景——办公室内】“定位&导航规划”“实测”【传感器】
无人机室内自主飞行,和地面站操作
视觉SLAM的本质多视图几何
【SLAM】【VIO】双目视觉+超强大的三维感知【室外高速工作场景】“实测”
基于先验地图的通用激光雷达定位框架
视觉SLAM半直接法是什么
基于3D GS的SLAM
IGE-LIO:充分利用强度信息克服激光退化场景下的定位精度
【SLAM】【VIO】双目视觉+超强三维感知力【应用场景——搭载在地铁列车上】“实测”
【SLAM】【VIO】双目视觉+超强大的三维感知力+tof 相机 【功能演示+实时重建】“实测”
r3live语义建图
视觉SLAM特征点法与直接法的区别是什么
大疆livox-mid360室外定位
赛博仙女棒研发成功
第25讲:Egoplanner集群仿真
隧道里面抡摆锤,暴力SLAM测试!
港科大沈邵劼团队开源! 自适应交互模态探索的多模态集成预测和决策
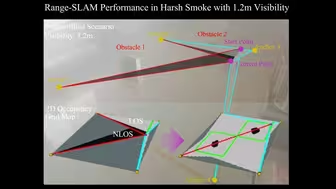
【UWB 抗烟尘SLAM】Range-SLAM: Ultra-Wideband-Based Smoke-Resistant Real-Time Localiza
滑铁卢大学发布! 迈向实时的高斯平滑:通过光度SLAM加速3DGS
存档毕设
End-to-End视觉里程计新突破:从运动模糊图像中精确估计相机姿态
套件教程-Point LIO介绍与使用
重新正常的激光雷达扫图
SLAM着色点云精细建模园林石雕!
SLAM着色点云模型三维重建!
TC2LI-SLAM: A Tightly-Coupled Camera-LiDAR-Inertial SLAM System
LSD-SLAM系统框架解读
比啃书高效!清华博士高翔:【视觉slam基础知识从理论到实践】视频教程
动态SLAM最新开源!可插入任意里程计!CAD-Mesher:生成静态、精确的稠密Mesh!