V
主页
京东 11.11 红包
【179.】基于优化反演技术的水面舰艇(USV)自适应跟踪控制
发布人
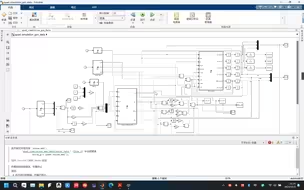
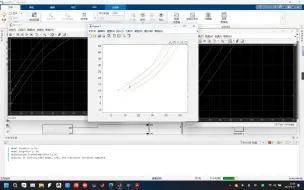
【179.】基于优化反演技术的水面舰艇自适应跟踪控制 【内容简介】提出了一种基于ptmze反步控制的水面舰船跟踪控制方法,该方法将优化作为一种反步设计原则。由于水面舰船系统是严格反馈形式的二阶动力学模型,因此反演是完成跟踪任务的理想方法。在水面舰艇反步控制中,将虚拟控制和实际控制设计为相应子系统的优化解,从而实现整体控制的优化。通常,优化控制是基于Hamilton-Jacobi-Bellman方程的解来设计的。然而,由于其固有的非线性和复杂性,求解该方程非常困难,甚至是不可能的。为了克服这一困难,通常考虑行动者-批评者架构的强化学习(RL)策略,其中利用评论家和行动者分别评估控制性能和执行控制行为。通过将actor-critic RL算法应用于船舶的虚拟和实际控制,证明可以达到理想的优化和跟踪性能。仿真结果进一步验证了所提水面舰艇控制方法的有效性。
打开封面
下载高清视频
观看高清视频
视频下载器
【最新一期】231.不会吧?不会吧?不会吧?还不会写控制理论相关的Matlab仿真?学长带你从小白->萌新,再到入门!!!
【最新一期】255.不会吧?不会吧?不会吧?还不会写控制理论相关的Matlab仿真?学长带你从小白->萌新,再到入门!!!
【最新一期】【232】带有有输出约束的二阶滑模控制器设计,学长带你从小白->萌新,再到入门!!!
【018】带有半马切换拓扑的事件触发领导跟随多智能体系统一致性
【219】 一类不确定非线性系统的自适应预设时间控制问题
【261】基于事件触发非周期采样的非线性系统的输出反馈控制
【014】带有多领导者和有向图的多智能体系统的分布式自适应事变组编队跟踪
217.【RNC】有输出约束和无输出约束的高阶非线性系统有限时间镇定的统一方法
80.SCI-期刊TFS具有扰动和量化的时滞非线性系统的自适应固定时间事件触发模糊控制
【176】基于Lyapunov模型预测控制(NMPC)的自主水下航行器轨迹跟踪控制,结合事件触发非周期采样策略
【最新一期】249.不会吧?不会吧?不会吧?还不会写控制理论相关的Matlab仿真?学长带你从小白->萌新,再到入门!!!
【021】基于神经网络的电力系统暂态稳定分布式自适应控制
42.东北大学硕士论文-基于事件触发机制的不确定线性系统的鲁棒控制
【第一期】161. 不会吧?不会吧?不会吧?还不会写控制理论相关的Matlab仿真?学长带你从小白变为萌新---以院士团队的控制顶刊“TAC”为例
【166.】一类不确定非线性系统的动态事件触发自适应控制
【022】基于平均驻留时间的切换模型参考自适应控制方法的研究
【163.】具有输出约束的高阶平面系统的输出反馈有限时间镇定
【184】多智能体系统的队列稳定性:一种自适应最优控制方法
【015】基于动态事件触发机制的随机采样策略下的半马尔科夫跳变的多智能体系统一致性
【111】带有输入延迟的非严格反馈非线性系统的自适应控制方法
【242】六自由度无人水下航行器 6DOF-Unmanned Underwater Vehicles (UUV)
【011】非完整移动多机器人系统有限时间一致性控制
【177】多智能体系统中分布凸优化的一种固定时间收敛算法
【004】基于事件触发的微电网经济分配一致性算法
【234】带有不确定动态的欠驱动水面舰艇的自适应动态面编队控制
【010】多智能体系统的分群牵引控制
【001】事件触发下多智能体系统一致性的干扰主动控制
【012】移动式破碎站履带行走装置机电耦合仿真及试验研究
【第六期】161. 不会吧?不会吧?不会吧?还不会写控制理论相关的Matlab仿真?学长带你从小白变为萌新---以院士团队的控制顶刊“TAC”为例
【003】单积分型多智能体系统的集中事件触发控制
【第五期】161. 不会吧?不会吧?不会吧?还不会写控制理论相关的Matlab仿真?学长带你从小白变为萌新---以院士团队的控制顶刊“TAC”为例
大家好,“送”给你们一个关于多智能体系统 (Multi-Agent Systems, MASs)的小Paper
【253】面向轨迹跟踪与避碰的无人水面舰艇实时非线性模型预测控制
【最新一期】【232】具有输出约束的二阶滑模控制器设计,学长带你从小白->萌新,再到入门!!!(补)
72.【SCI】基于鲁棒自适应控制技术的未知参数和扩散效应非同构神经网络同步
153.【毕业设计】基于神经网络的多智能体一致性控制算法研究
【252】基于数据驱动策略迭代的优化跟踪控制问题
【243】基于模型预测控制的多水面舰艇编队控制策略
【第二期】161. 不会吧?不会吧?不会吧?还不会写控制理论相关的Matlab仿真?学长带你从小白变为萌新---以院士团队的控制顶刊“TAC”为例
【017】MPC模型预测控制从原理到代码实现(基础原理)