V
主页
透彻!特斯拉occupancy network详解
发布人
透彻!特斯拉occupancy network详解 自动驾驶之心官网正式上线了:www.zdjszx.com(海量视频教程等你来学) ①YOLOv3~YOLOv8/YOLOX/PPYOLO系列全栈学习教程 ②国内首个BEV感知全栈学习教程(纯视觉+多传感器融合方案) ③多传感器融合中的毫米波雷达-视觉融合感知全栈教程 ④Lidar+Radar+Camera+IMU离线/在线近20+标定方案教程等你来学 ⑤模型部署实战:基于TensorRT的CNN/Transformer/检测/BEV模型四大部署代码+CUDA加速 ⑥规划控制理论&实战课程:PID、LQR、MPC全掌握 课程咨询联系AIDriver004,科研合作及辅导联系AIDriver002。
打开封面
下载高清视频
观看高清视频
视频下载器
面向自动驾驶领域的BEV与Occupancy网络的全景解析与实战
从BEV到Occupancy:受到了特斯拉的升维打击?(上)
occupancy network
BEV感知,入门学习
BEV 网络与Occupancy 之间的关系--(自动驾驶之星第一次线上活动--《 中低算力平台友好的环视特征融合方案》)
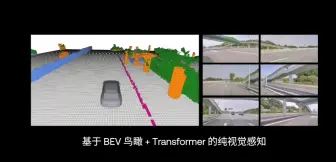
BEV与Occupancy网络的全景解析与实战
Occupancy的工程细节
BEV与Occupancy网络全景解析与实战!
为什么需要Occupancy Network?数据结构是怎么样的?
cvpr2023 特斯拉讲解世界模型自动驾驶
手撕我自己:The Eyes Have It,目前最简单的3D Occupancy?
极越的量产“国内首个纯视觉”Occupancy network,汽车机器人极越01今晚8点上市公布价格了
Occupancy Networks [CVPR 2022 WAD] Tesla FSD 防碰撞新机制
CVPR23 | 3D Occupancy 预测冠军方案:FB-OCC
世界模型!特斯拉CVPR2023 Workshop!
智能驾驶系统的关键算法Occupancy到底是什么?解决了什么问题?两分钟给你讲明白~
Occupancy Network & DeepSDF
分类突破!自动驾驶中的Occupancy感知方法分类
从BEV到Occupancy:受到了特斯拉的升维打击?(下)
TPVFormer:特斯拉occupany network的学术替代方案!清华大学工作
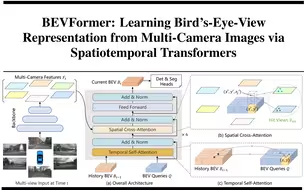
2023-自动驾驶全解-BEVFormer:基于Transformer的自动驾驶BEV纯视觉感知!(论文解读+代码复现)
理想宣称占用网络是纯视觉并发布展示视频,华为才发布的God占用网络用的是激光雷达,理想Occupancy network就纯视觉了,装激光雷达是研发练手用?
NVIDIA 自动驾驶实验室:为自动驾驶汽车带来先进3D Occupancy预测
首测!基于特斯拉占用网络的泊车辅助什么水平?
SurroundOcc:用于自动驾驶的多相机3D Occupancy预测
基于纯视觉感知(3D Occupancy Network)的室内低速无人小车
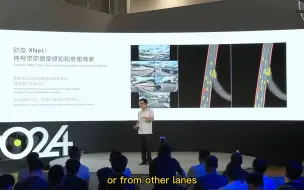
小鹏汽车技术分享:Transformer XNet - Bird's Eye View Neural Network
纯视觉不靠谱?你能听懂的特斯拉人工智能自动驾驶解密上集!全网最细致!TESLA AI DAY EXPLAINED
多模态融合BEV感知算法介绍
特斯拉的World Model是什么?怎么做端到端训练?
Vision Takes All !极越 OCC 占用网络技术如何实现?我们展开说一说!
特斯拉最新Occupancy和3D视觉!泊车辅助中的应用
BEVFormer:基于Transformer的自动驾驶BEV纯视觉感知,支持3D检测、地图分割等多个自主驾驶感知任务!迪哥精讲BEVFormer模型!
bevformer全网最细最全最磨叽代码解读
蔚来实时感知BEV占用网络展示
科普一下,特斯拉FSD beta 10.69引入的occupancy networks到底是什么,如何防碰撞的?
Tesla惊艳的防碰撞机制是如何实现的?TESLA Occupancy Networks:Don’t Crash, EVER!!
【大刘科普】特斯拉纯视觉自动驾驶深度解读!8个摄像头背后隐藏的巨大工程 | 论文级分析
自动驾驶中的Occupancy Grid占用栅格算法
上车必备的Occupancy算法真值是如何获取的?