V
主页
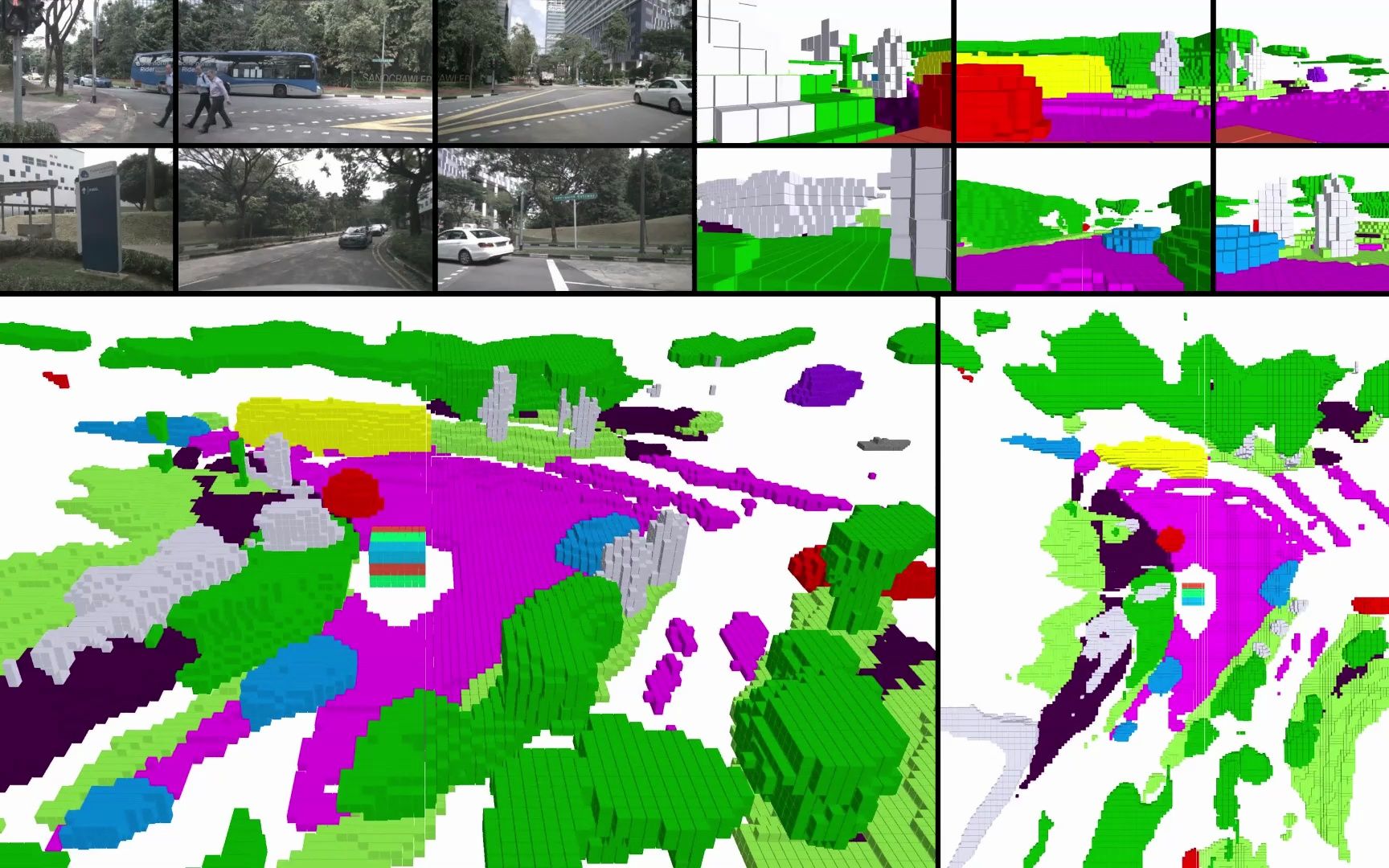
TPVFormer:特斯拉occupany network的学术替代方案!清华大学工作
发布人
论文链接:https://arxiv.org/pdf/2302.07817 以视觉为中心的现代自动驾驶感知方法广泛采用鸟瞰图(BEV)来描述3D场景。尽管它比体素表示效率更高,但是在描述一个单一平面的场景的细粒度3D结构方面存在困难。为了解决这个问题,作者提出了一种三透视视图(TPV)表示方法,它伴随着 BEV 和两个额外的垂直平面。通过总结三个平面上的投影特征来模拟3D空间中的每个点。将图像特征提升到3D TPV 空间,进一步提出了一种基于transformer的 TPV 编码器,有效地获取了 TPV 特征。使用注意机制来聚合每个 TPV 平面上对应于每个查询的图像特征。实验表明,稀疏监督训练后的模型能够有效地预测所有体素的语义占有率。首次在 nuScenes 上演示了在 LiDAR 分割任务中,仅使用相机输入就可以获得与基于 LiDAR 的方法相当的性能。
打开封面
下载高清视频
观看高清视频
视频下载器
特斯拉的World Model是什么?怎么做端到端训练?
端到端算法是什么?自动驾驶领域是怎么做的?
LeTS-Drive:自动驾驶中不确定场景下的实时路径规划算法
清华大学&英伟达 | DriveEnv-NeRF:基于NeRF实现高逼真自动驾驶场景,离线测试!
ICRA2023 | 激光雷达相机内外参联合标定方案!
UC伯克利最新!S3Gaussian:全球首个开源的自动驾驶场景3D GS工作
最新!如何使用深度强化学习在未知环境中进行导航?
什么是端到端自动驾驶?什么是基础world model?
Depth Anything V2 | 速度提升10倍以上!更稳健、精细的单目深度估计(HKU&TikTok)
以特斯拉为案例:自动驾驶仿真框架分析(下,仿真应用/2D检测/3D检测/车道线)
来听大牛说!赵行老师在CVPR 2023年自动驾驶研讨会上发表的演讲
从0到1!彻底搞懂BEVFormer算法原理
毫米波雷达视觉算法CRAFT,这次彻底理解了!
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
CVPR2023 Nuplan自动驾驶轨迹规划比赛第二名方案详解
视觉3D检测如何做自动标注?
在线高精地图与城市NOA是什么关系?为什么如此重要?
校招和社招转行人必看!2023年如何入局自动驾驶?
英伟达冠军方案!Hydra-MDP:多模态端到端自动驾驶详解
闭环驾驶SOTA!CarLLaVA: CARLA自动驾驶挑战赛2.0第一名方案!
实时3D激光SLAM | 基于广义ICP和位姿图优化的实时无里程计方案(超赞!)
【地平线×自动驾驶之心】ICCV 2023最新中稿的端到端自动驾驶框架—VAD!
【地平线×自动驾驶之心】在线高精矢量化地图构建SOTA方案MapTR v1/v2、LaneGAP
端到端数据格式是什么样的?快来看看吧
IROS2022 | 毫米波雷达和相机融合在高分辨率和远距离深度成像中的探索
端到端趋势下,传统规控还有未来么?
毫米波雷达视觉到底是怎么融合的?CenterFusion你搞懂了吗?
如何转行自动驾驶算法?后端开发转行到自动驾驶算法工程师
看到了这个视频,彻底搞懂了PETR算法!
自动驾驶中的多传感器融合状态估计如何建模?
ETH最新!CVPR2024 | GoMVS:多视图几何重建新SOTA
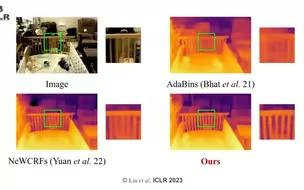
ICLR 2023 |VA-DepthNet:单目图像深度预测的变分方法
还在为数据集发愁?!带你了解自动驾驶常见数据集哪里找!
【ECCV 2022】显著减少自动驾驶碰撞率!可微分光线投射应用于自监督占位预测
如何从零搭建自己的自动驾驶C++功能模块?
冠军分享!QCNeXt:面向下一代多智能体联合轨迹预测新框架(CVPRW2023)
大纲一览 | 规划控制算法都在这里了!PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?
重磅开源!MARS:基于隐式场的场景感自动驾驶仿真
自动驾驶规控工程师必备技能点!Coupling Trajectory Planning是个啥?
基于交互感知的自动驾驶车辆轨迹规划——神经网络与模型预估计控制的集成