V
主页
多模态融合BEV感知算法介绍
发布人
自动驾驶之心官网正式上线了:www.zdjszx.com(海量视频教程等你来学) 1.自动驾驶感知:YOLOv3~YOLOv8/YOLOX/PPYOLO系列全栈学习教程 2.自动驾驶感知:国内首个BEV感知全栈学习教程(纯视觉+多传感器融合方案) 3.自动驾驶感知:多传感器融合中的毫米波雷达-视觉融合感知全栈教程 4.自动驾驶多传感器标定:Lidar+Radar+Camera+IMU离线/在线近20+标定方案 小助理微信咨询:AIDriver004
打开封面
下载高清视频
观看高清视频
视频下载器
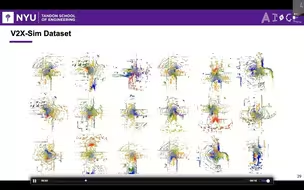
多传感器融合!BEV感知融合算法介绍
端到端算法有哪些优势?完爆传统感知规控?
端到端算法是什么?自动驾驶领域是怎么做的?
2022最新!基于激光雷达的3D目标检测综述(超全数据集和SOTA方法汇总)
美团 | FocusBEV:自标定与时间融合策略提升单目BEV分割性能
在线高精地图与城市NOA是什么关系?为什么如此重要?
端到端基础!绕不开的感知模块
CVPR2023最新!TBP Former:BEV下以视觉为中心的自动驾驶中的联合感知和预测网络
地平线最新SOTA!Sparse4D:迈向长时序稀疏化3D目标检测的新实践
多模态3D检测相关2D和3D感知基础知识
高精地图制作关键技术及领域主流方案分享-part1
LeTS-Drive:自动驾驶中不确定场景下的实时路径规划算法
看到了这个视频,彻底搞懂了PETR算法!
牛津大学IROS2023最新!激光雷达相机外参标定新算法(大幅降低误差)
CVPR2024最新BEV-Planner:Ego Status对于开环端到端自动驾驶的影响有哪些?
分类突破!自动驾驶中的Occupancy感知方法分类
超全干货 | 自动驾驶中的传感器融合:前融合+后融合+特征级融合(方法与策略)
2022最新 | HybridNets:端到端感知网络(检测+可行使区域分割+车道线三大任务)
如何转行自动驾驶算法?后端开发转行到自动驾驶算法工程师
最新!DiscoNet:稀疏遮挡Lidar点云下的鲁棒3D感知方法!
讲明白了!端到端算法评估指标详解
自动驾驶多传感器数据融合(2):IMU和GPS的融合定位
ECCV 2022 Workshop: 自动驾驶视觉感知分享
World Model!大火的世界模型到底是什么?
自动驾驶中的多传感器融合有什么优势?如何快速入门到进阶?
自动驾驶仿真框架CARLA教程(3):Car Agent强化学习环境
香港大学最新!ROG-map:高效的以机器人为中心的占用网格地图
BEV-SAN:通过切片注意力网络实现精确的BEV 3D检测
上交&诺亚最新 | 大幅提升!OccGen:面向自动驾驶的生成式多模态3D占用预测
MetaBEV:解决BEV检测和地图分割的传感器故障新方案
CVPR2022 | MeMOT:具有记忆的多目标跟踪
使用YOLOv4完成激光雷达点云下的3D目标检测!
为什么说规划控制仍然是端到端自动驾驶的核心?全面复盘规划控制基础及决策规划框架
多传感器标定的工具箱有哪些?
ECCV2022 workshop | 自动驾驶中的自监督学习part1(数据处理、深度估计、3D检测/跟踪、SLAM、定位等!)
ECCV 2022最新 | DynamicDepth:无监督多帧单目深度估计新SOTA!
CVPR2024 | 逆天了!一统所有目标感知任务,目标感知基础模型GLEE
最近有哪些自动驾驶方向的github仓库值得star?
All in 算法并不是最佳职业发展道路?软件基础架构也是必须了解的!
NeRF如何监督Occupancy Networks?