V
主页
具身智能Astribot S1?下一代人工智能机器人~AI赋能万物!
发布人
AI赋能万物!
打开封面
下载高清视频
观看高清视频
视频下载器
强化学习用于四足机器人的高级技能(站立、俯冲行走)
这真的太像真人套壳了!挪威机器人公司发布家用机器人1x NEO
端到端基础!绕不开的感知模块
前沿发布|星海图空间智能:全球首个机器人Real2Sim2Real引擎
性能提升近40%!ViPlanner:室内外局部导航全搞定(ICRA 2024)
自动驾驶中的多传感器融合状态估计如何建模?
具身智能系列之入门学习课程【直播回放】
低成本,但很惊艳,带16线激光雷达的自动机器人SLAM演示
有人能告诉我具身智能是什么吗? #大模型 #具身智能 #机器人
【IROS 2022】机器人超硬核点云配准方法:Linewise Non-Rigid Point Cloud Registration
登顶Nature!带事件摄像机的低延迟自动驾驶视觉新方案!
具身智能领域最容易落地的方向-遥操作
为什么人在梦里跑不快,人脑和动物脑互换实验?大模型都活在梦里
【ICRA 2023】COVINS-G: 一种协同可视化惯性 SLAM 通用后端
宇树科技王兴兴:世界模型 AGI
大牛带你彻底搞懂UltraFastLane车道线检测算法(一)
ICRA 2024 | PeLiCal:机器人无目标外参标定新方案!鲁棒性拉满了~
讲明白了!端到端算法评估指标详解
突破次元壁!4D Gaussian Splatting来袭
【ICCV 2023】HAMLET:实时语义分割域自适应方法
特斯拉的World Model是什么?怎么做端到端训练?
港科大最新!Vista:高保真度、通用可控性的自动驾驶世界模型
创新中心具身智能机器人家族闪耀登场
「当机器人遇见中秋」零次方具身机器人:落地月饼生产线
看到了这个视频,彻底搞懂了PETR算法!
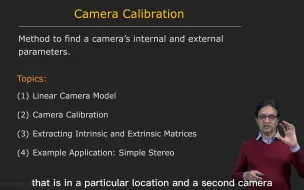
相机标定任务概述 | 哥伦比亚大学相机模型与标定系列课程(1)
大火的BEVFusion算法详解
BEVFusion:一个简单而鲁棒的Lidar-Camera融合框架
使用概率深度补全的3D激光雷达重建(IROS2022)
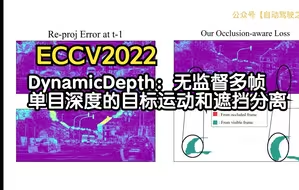
ECCV2022 | DynamicDepth:无监督多帧单目深度的目标运动和遮挡分离
Talk|清华大学诸子钰:面向具身智能的通用3D视觉语言理解
端到端算法是什么?自动驾驶领域是怎么做的?
从0到1!彻底搞懂BEVFormer算法原理
数据太逼真了!DriveDreamer:走向真实世界驱动的自动驾驶世界模型
适用任意相机模型!高通提出的BEV分割框架DaF-BEVSeg来了
自动驾驶中的多传感器融合有什么优势?如何快速入门到进阶?
AI Agent互联网时代来临暨具身智能未来发展展望(分享嘉宾:AIGCLINK发起人占冰强)
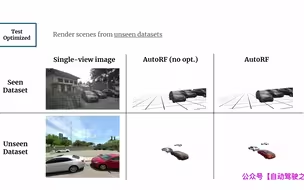
CVPR2022 | AutoRF:从单视角观察中学习3D目标辐射场(nuScenes和KITTI上表现良好)
冠军分享!QCNeXt:面向下一代多智能体联合轨迹预测新框架(CVPRW2023)
30元教你学会用Issacgym训练宇树机器狗试听第二期