V
主页
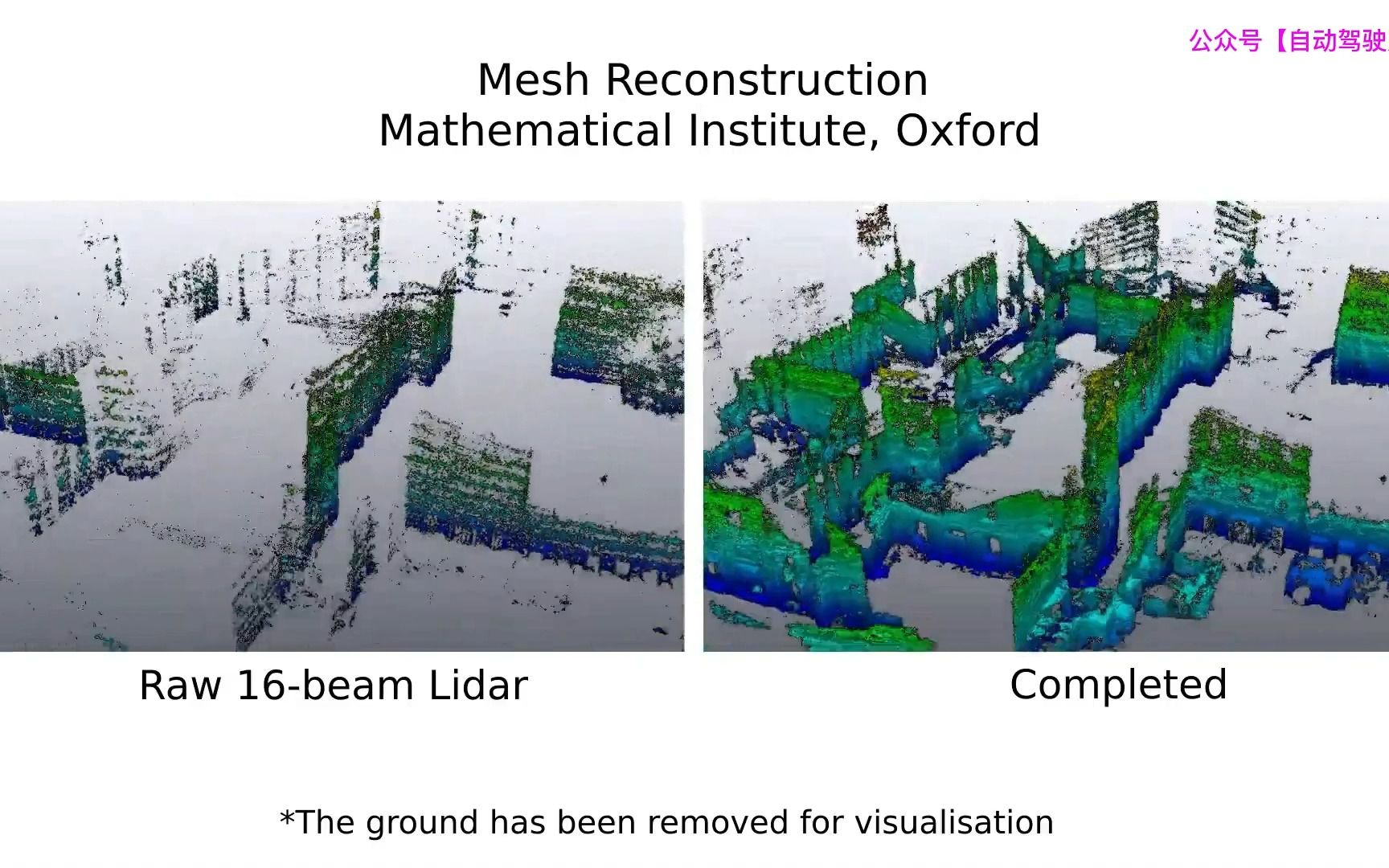
使用概率深度补全的3D激光雷达重建(IROS2022)
发布人
原文链接:https://arxiv.org/abs/2207.12520 机器人技术中的安全运动规划要求规划到已被证实无障碍的空间中。然而,由于深度测量的稀疏性,使用激光雷达获得此类环境表示具有挑战性。我们提出了一种学习辅助的3D激光雷达重建框架,该框架借助于重叠的摄像机图像对稀疏激光雷达深度测量进行上采样,以便生成具有比单独使用原始激光雷达测量更明确的自由空间的更密集的重建。
打开封面
下载高清视频
观看高清视频
视频下载器
超详细的激光雷达相机标定教程!(Lidar-Camera)
通过Intel Realsense 3D激光雷达完成SLAM任务!(性价比超高)
IROS2022 | 毫米波雷达和相机融合在高分辨率和远距离深度成像中的探索
实时3D激光SLAM | 基于广义ICP和位姿图优化的实时无里程计方案(超赞!)
【IROS2022】MPC-PF:使用势场的自动驾驶动态目标的社会交互感知轨迹预测
ICRA 2023 | 直接激光雷达惯性里程计:具有连续时间运动校正功能的轻量级LIO(UCLA最新)
VastGaussian:首个基于3D Gaussian Splatting的大场景高质量重建和实时渲染方法
2022最新!基于激光雷达的3D目标检测综述(超全数据集和SOTA方法汇总)
使用YOLOv4完成激光雷达点云下的3D目标检测!
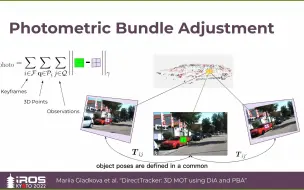
最新3D多目标跟踪方法DirectTracker:基于直接图像对齐和光度学束调整的3D多目标跟踪(IROS2022)
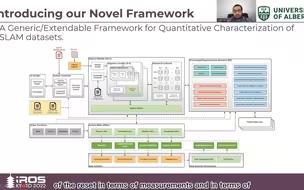
IROS2022 | 我们准备好进行鲁棒且有弹性的SLAM了吗?
香港理工大学最新!Slamesh: 使用激光雷达传感器进行实时定位和网格划分
搞懂了!原来激光雷达和相机的内外参是这样标定的
最新多传感器融合数据集!Hilti SLAM Challenge Dataset(RAL-IROS 2022)
逆天了!NeRF-Casting:逼真重建和渲染高光泽目标
逆天了!NeLF-Pro | 一个方法解决多种规模场景的快速渲染重建(CVPR'24)
用于激光雷达视图合成和三维重建的瞬态神经辐射场
大火的BEVFusion算法详解
英伟达最新!SCube:仅用三张图,就能实现即时大规模三维场景重建
超全干货 | 自动驾驶中的传感器融合:前融合+后融合+特征级融合(方法与策略)
大幅超越SuperGlue!ICCV2023最新端到端特征匹配方法
多传感器标定的工具箱有哪些?
FreeScan Combo 可以重建人体的手持扫描仪
IROS2022最新思路 | RCA:自监督学习实现视觉导航(具有驾驶舒适性)
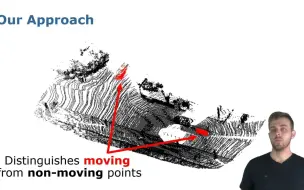
【IROS2022】超酷Demo | 使用稀疏4D卷积分割点云中的移动物体
英伟达最新!NeRF XL:将NeRF分布到多个GPU扩展,对任意大容量的NeRFs进行训练和渲染
LIO-SAM:一种紧耦合激光雷达-惯性里程计
太详细了!多传感器融合的策略和方法
自动驾驶多传感器数据融合(2):IMU和GPS的融合定位
基于NVIDIA Isaac Sim和LIO-SAM的激光SLAM demo
SemanticKITTI SOTA!激光雷达数据中的运动目标分割(IROS2022)
牛津大学最新!室内室外SOTA | 用于视觉重定位的地图相对姿态回归(CVPR'24 HighLight)
香港大学最新!ROG-map:高效的以机器人为中心的占用网格地图
在线高精地图与城市NOA是什么关系?为什么如此重要?
高精地图制作关键技术及领域主流方案分享-part1
M-LIO:提升传感器信号丢失容忍度的多激光雷达和多IMU里程计
速度提高60倍!重建你的自动驾驶场景 | GaussianCity:无边界三维城市场景重建(南洋理工大学)
毫米波雷达量产实战!Radar是如何获取点云的?
LIO-Fusion:通过与GNSS/重新定位和车轮里程计的有效融合增强LIO
【CoRL2022】路径规划新SOTA!PlanT:通过目标级表示的可解释的规划Transformers