V
主页
性能提升近40%!ViPlanner:室内外局部导航全搞定(ICRA 2024)
发布人
项目链接:https://leggedrobotics.github.io/viplanner.github.io/ 论文链接:https://arxiv.org/abs/2310.00982 由于地形可穿越性的差异、各种障碍物以及快速决策的必要性,户外环境中的实时路径规划仍然对现代机器人系统构成挑战。现有的方法主要集中在几何导航解决方案上,这些解决方案对结构化的几何障碍物很有效,但在不同地形类型及其可供性的语义解释方面存在局限性。此外,这些方法无法识别可遍历的几何引用,例如楼梯。为了克服这些问题,我们介绍了ViPlanner,这是一种学习的局部路径规划方法,它基于几何和语义信息生成局部规划。该系统使用强制学习范式进行训练,基于规划任务目标对网络权重进行端到端优化。这种优化使用了语义成本图的可微分公式,使规划者能够区分不同地形的可穿越性,并准确识别障碍物。使用RGB颜色空间将语义信息表示为30个类,该RGB颜色空间可以有效地对多个级别的可遍历性进行编码。实验结果表明,与纯粹基于几何的方法相比,抗噪声、零样本模拟到真实传递以及可通行性成本降低了38.02%。
打开封面
下载高清视频
观看高清视频
视频下载器
500公里超大型SLAM数据集!多视觉异步SLAM系统(ICRA 2021)
ICRA 2024 | 轨迹规划的终极状态
最新!如何使用深度强化学习在未知环境中进行导航?
3D目标检测的数据标注/算法讲解/训练调优全系列闭环
【ICRA 2023】COVINS-G: 一种协同可视化惯性 SLAM 通用后端
看看顶级大佬如何梳理L2++决策算法的演进-下
麻省理工团队 | Fast-LiDARNet:基于激光雷达的高效鲁棒端到端导航框架
看看顶级大佬如何梳理L2++决策算法的演进-上
讲明白了!端到端算法评估指标详解
激光雷达3D目标检测算法有哪些?怎么分类的?
直接制霸天空!ICRA’24 最新基于强化学习的MPC算法,苏黎世大学出品!
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
牛津大学最新!室内室外SOTA | 用于视觉重定位的地图相对姿态回归(CVPR'24 HighLight)
计算效率提升20% | 直接LiDAR-惯性里程计:具有连续时间运动校正的轻量级LiDAR-惯性里程计
【ICRA 2023 | 首篇研究LiDAR基础设施部署的工作!作者亲自带你玩转传感器部署策略】第3节:车路协同场景激光雷达部署策略优化方法
看到了这个视频,彻底搞懂了PETR算法!
CVPR 2024 | 相机标定算法再升级!基于圆锥曲线的无偏估计~失真也好用!
车辆轨迹有多少种玩儿法?CitySim数据集:轨迹预测、仿真、数字孪生应有尽有!
VastGaussian:首个基于3D Gaussian Splatting的大场景高质量重建和实时渲染方法
LIO-Fusion:通过与GNSS/重新定位和车轮里程计的有效融合增强LIO
大纲一览 | 规划控制算法都在这里了!PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?
大幅超越SuperGlue!ICCV2023最新端到端特征匹配方法
自动驾驶中的多传感器融合状态估计如何建模?
面向下一代自动驾驶:全栈里程碑综述汇总
IROS 2024 | NAVINACT:结合导航和模仿学习进行增强强化学习
2022最新!基于激光雷达的3D目标检测综述(超全数据集和SOTA方法汇总)
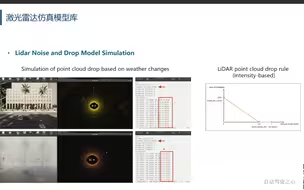
【ICRA 2023 | 首篇研究LiDAR基础设施部署的工作!作者亲自带你玩转传感器部署策略】第2节:高一致性传感器仿真模型库
浙江大学最新 | BEVPlace++:激光雷达全局定位方法,超越当前SOTA!泛化性能极佳
特斯拉的World Model是什么?怎么做端到端训练?
为自动驾驶构建城市规模的神经辐射场
端到端基础!绕不开的感知模块
自动驾驶仿真大观:聊聊仿真的研究背景
Segment Any Point Cloud:运用视觉基础模型分割一切点云
【CVPR 2024】SIN-SLAM:基于神经隐式表征的稠密语义SLAM
2022最新 | HybridNets:端到端感知网络(检测+可行使区域分割+车道线三大任务)
一文尽览:自动驾驶大语言模型应用综述分享
端到端数据格式是什么样的?快来看看吧
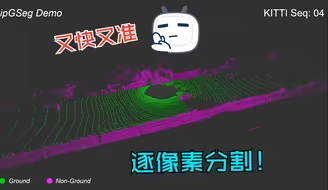
又快又准!一种基于图像表示的快速精确的LiDAR地面分割算法
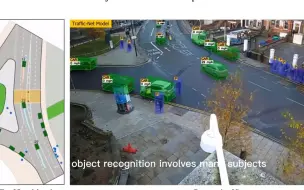
基于深度学习的3D目标识别算法系统(WiMi)
CARLA实操,带你玩转常用地图格式转换及可视化