V
主页
自动驾驶中的多传感器融合状态估计如何建模?
发布人
自动驾驶中,多传感器融合是主流,而状态估计是核心,那如何对状态估计进行建模呢?完整课程咨询小助理微信:AIDriver004 自动驾驶之心官网正式上线了:www.zdjszx.com(海量视频教程等你来学) ①YOLOv3~YOLOv8/YOLOX/PPYOLO系列全栈学习教程 ②国内首个BEV感知全栈学习教程(纯视觉+多传感器融合方案) ③多传感器融合中的毫米波雷达-视觉融合感知全栈教程 ④Lidar+Radar+Camera+IMU离线/在线近20+标定方案教程等你来学 ⑤模型部署实战:基于TensorRT的CNN/Transformer/检测/BEV模型四大部署代码+CUDA加速 ⑥规划控制理论&实战课程:PID、LQR、MPC全掌握 ⑦多传感器融合目标跟踪课程:基于贝叶斯/卡尔曼滤波的目标跟踪技术详解 课程咨询联系AIDriver004,科研合作及辅导联系AIDriver002。
打开封面
下载高清视频
观看高清视频
视频下载器
超全干货 | 自动驾驶中的传感器融合:前融合+后融合+特征级融合(方法与策略)
太详细了!多传感器融合的策略和方法
LeTS-Drive:自动驾驶中不确定场景下的实时路径规划算法
基于交互感知的自动驾驶车辆轨迹规划——神经网络与模型预估计控制的集成
最新!如何使用深度强化学习在未知环境中进行导航?
自动驾驶多传感器数据融合(3):单目标跟踪算法
自动驾驶多传感器数据融合(1):什么是多传感器融合?
端到端算法是什么?自动驾驶领域是怎么做的?
毫米波雷达视觉到底是怎么融合的?CenterFusion你搞懂了吗?
多传感器标定概述(Lidar/Radar/Camera/IMU/鱼眼相机)
端到端模型上车了!GraphAD:国内首个可实车量产部署的端到端建模范式
自动驾驶仿真利器!Street Gaussian:基于3D Gaussian Splatting的动态三维街景建模
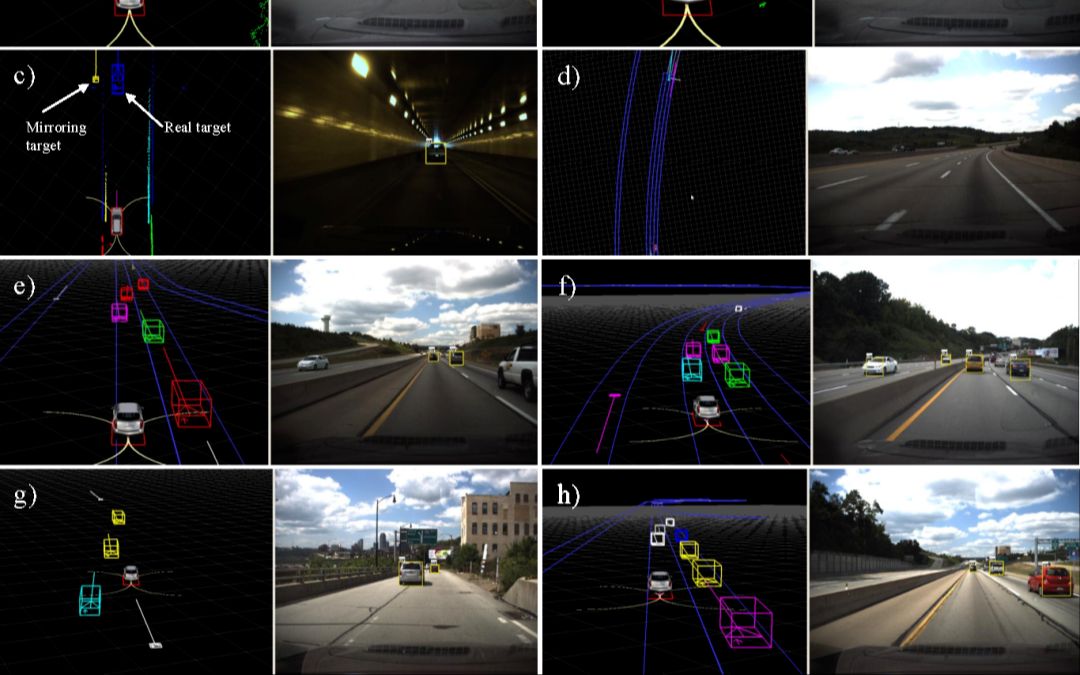
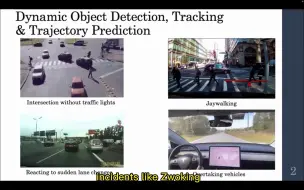
基于多传感器的自动驾驶动态目标检测、跟踪和轨迹预测
ICRA2022 | 基于图的多传感器融合在自动施工机器人一致定位中的应用
R3LIVE++:一个实时鲁棒的紧耦合激光雷达-惯性-视觉融合框架
MetaBEV:解决BEV检测和地图分割的传感器故障新方案
自动驾驶落地离不开的C++!快来实现第一个自动驾驶模块吧
牛津大学 | IMU+Lidar+GNSS的多传感器融合用于机器人的精准定位!
一文尽览:自动驾驶大语言模型应用综述分享
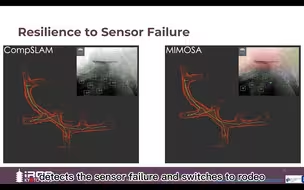
【IROS 2022】多模态SLAM框架MIMOSA:一种针对传感器退化的弹性自治多模态SLAM框架
超逼真的数据!实时高质量渲染,用于动态城市场景建模的Street Gaussians
IROS2022 | 毫米波雷达和相机融合在高分辨率和远距离深度成像中的探索
TPVFormer:特斯拉occupany network的学术替代方案!清华大学工作
透彻!特斯拉occupancy network详解
自动驾驶缺少数据怎么办?ChatSim助你生成高度真实的驾驶数据!
自动驾驶中的激光雷达点云分割-part2
OmniDet:环视鱼眼多任务感知网络(深度估计、视觉里程计、语义和运动分割、目标检测和镜头污染检测)
干货来了!ADAS传感器产品及市场分析
如何从零搭建自己的自动驾驶C++功能模块?
【多伦多大学—自动驾驶课程】状态估计与定位(最小二乘法):1谷神星的发现与最小二乘法
传感器融合教程 Part 1 - 3D目标检测概述(3D Object Detection Overview)
L4自动驾驶感知的终极形态会是协同感知吗?UCLA顶级博士告诉你答案!
香港科技大学最新!MARC:自动驾驶的多极和风险意识应急计划
【地平线×自动驾驶之心】ICCV 2023最新中稿的端到端自动驾驶框架—VAD!
自动驾驶规划控制的未来是什么?
牛的!大佬是如何几分钟聊透时空联合规划框架的?
LIO-Fusion:通过与GNSS/重新定位和车轮里程计的有效融合增强LIO
轨迹规划新方案!基于差分平坦度的自动驾驶车辆轨迹规划
Tesla FSD V13前瞻!
Nerf+SLAM会擦出什么样的火花?