V
主页
登顶Nature!带事件摄像机的低延迟自动驾驶视觉新方案!
发布人
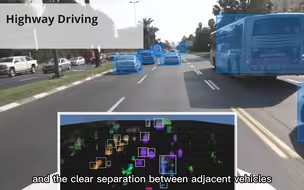
论文链接:https://www.nature.com/articles/s41586-024-07409-w 代码链接:https://github.com/uzh-rpg/dagr 当今先进的驾驶员辅助系统中使用的计算机视觉算法依赖于基于图像的RGB摄像头,这导致了提供安全驾驶体验的关键带宽延迟权衡。为了解决这一问题,事件摄像机已经成为替代视觉传感器。事件摄像机异步测量强度变化,提供高时间分辨率和稀疏性,大大降低了带宽和延迟要求。尽管有这些优势,但基于事件相机的算法要么效率很高,但在准确性方面落后于基于图像的算法,要么牺牲事件的稀疏性和效率来实现可比较的结果。为了克服这一点,我们提出了一种新的基于事件和帧的混合对象检测器,它保留了每种模态的优势,因此不会受到这种折衷的影响。我们的方法利用事件的高时间分辨率和稀疏性以及标准图像中丰富但低时间分辨率的信息来生成高效、高速率的对象检测,从而减少感知和计算延迟。我们展示了使用20 Hz RGB相机加上事件相机可以在不影响精度的情况下实现与带宽为45 Hz的5000 Hz相机相同的延迟。我们的方法通过揭示事件摄像机的潜力,为边缘情况下的高效和稳健感知铺平了道路。
打开封面
下载高清视频
观看高清视频
视频下载器
天塌了,20届智能车赛成为最后的绝唱
最新!如何使用深度强化学习在未知环境中进行导航?
LeTS-Drive:自动驾驶中不确定场景下的实时路径规划算法
AI 挑战错觉图 51
ICRA2023 | 激光雷达相机内外参联合标定方案!
智能镊子
为什么大学计算机全是深度学习?
【桌面智能机器人】情绪反馈,语音对话,复刻成功!
自动驾驶多传感器数据融合(2):IMU和GPS的融合定位
真的超容易“搞深度学习神经网络到底怎么改代码的啊?”复旦博士教我用一本书搞定!
透彻!特斯拉occupancy network详解
scaling law变天 哈佛、斯坦福、MIT名校研究发现 训练数据越多量化损失越大
【华为Mate 70系列】一抓一放,掌控全场
上交&诺亚最新 | 大幅提升!OccGen:面向自动驾驶的生成式多模态3D占用预测
爆肝整理!CVPR2024可复现论文合集,原文/代码/演示全都有!(深度学习/计算机视觉)
Depth Anything V2 | 速度提升10倍以上!更稳健、精细的单目深度估计(HKU&TikTok)
ITSC2023 | LimSim:长期可交互多场景交通仿真器
同时优化姿态和占用图!Occupancy-SLAM:基于优化的SLAM方法
灵境OASim:仿真照进现实,生成更近一步
Telegram十亿用户市场无人问津?微软AI月访破6000万!
介绍首个拥有真实肌肉的合成AI人类(假人即将问世)
英伟达提出EmerNeRF:大规模动态自动驾驶场景重建
实时3D激光SLAM | 基于广义ICP和位姿图优化的实时无里程计方案(超赞!)
基于运动约束的深度强化学习移动机器人避障
特斯拉的World Model是什么?怎么做端到端训练?
小米智能卫生巾,已接入米家
500公里超大型SLAM数据集!多视觉异步SLAM系统(ICRA 2021)
一文尽览:自动驾驶大语言模型应用综述分享
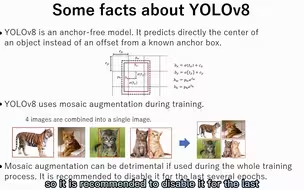
如何在ROS2中使用YOLOv8?
端到端算法有哪些优势?完爆传统感知规控?
OmniDet:环视鱼眼多任务感知网络(深度估计、视觉里程计、语义和运动分割、目标检测和镜头污染检测)
聊一聊4D成像雷达在辅助驾驶领域的应用
牛津大学最新!室内室外SOTA | 用于视觉重定位的地图相对姿态回归(CVPR'24 HighLight)
【地平线×自动驾驶之心】在线高精矢量化地图构建SOTA方案MapTR v1/v2、LaneGAP
CVPR 2023 | BEVHeight:基于视觉的道路3D目标检测的鲁棒框架
看完缓解了我的技术焦虑!自动驾驶的产线标定以及标定间标定方法
几可乱真!面向真实场景的世界模型居然被用得这么六!
牛津大学IROS2023最新!激光雷达相机外参标定新算法(大幅降低误差)
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?