V
主页
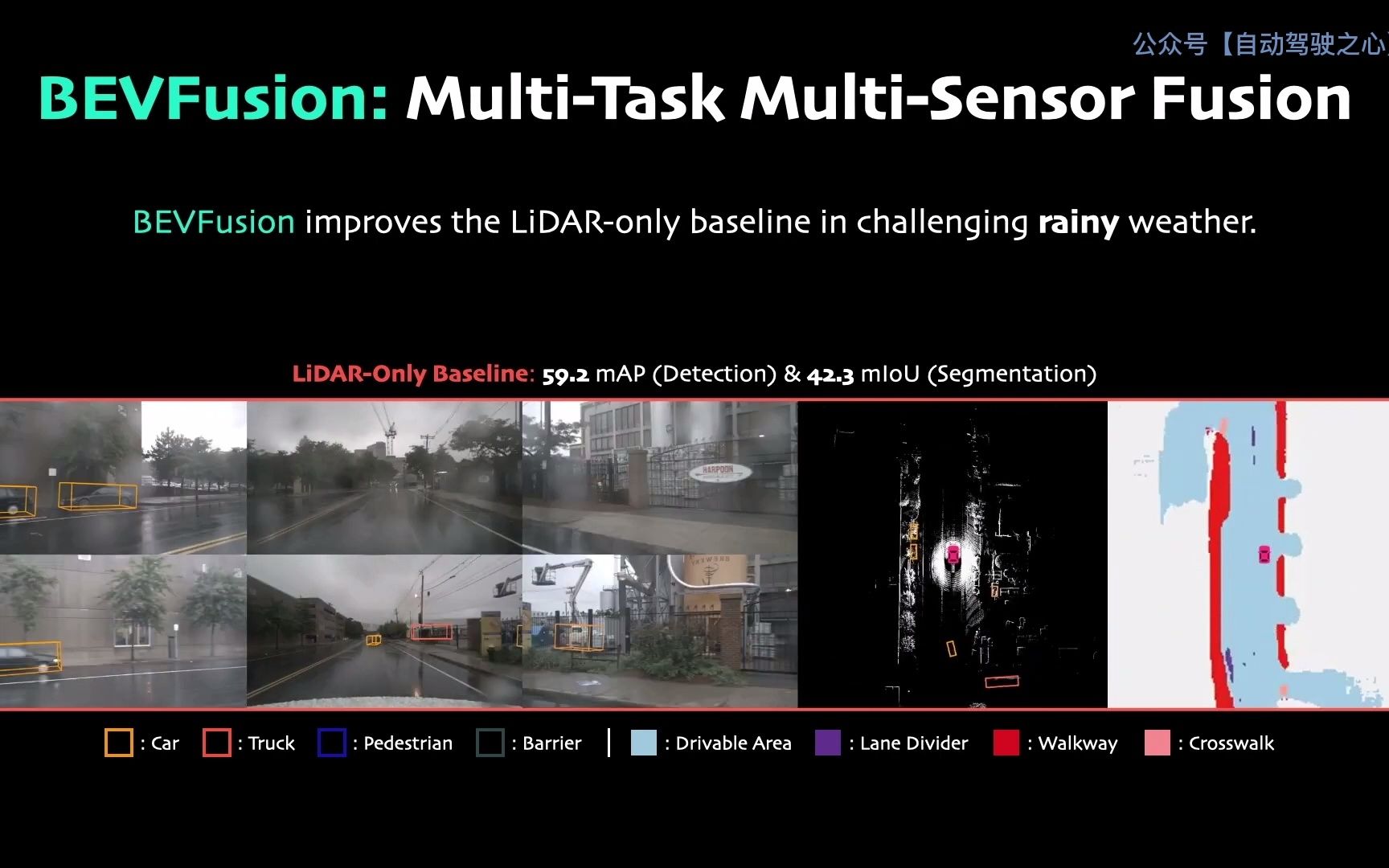
BEVFusion:一个简单而鲁棒的Lidar-Camera融合框架
发布人
论文链接:https://arxiv.org/pdf/2205.13542.pdf 代码链接:https://github.com/ADLab-AutoDrive/BEVFusion 目前Lidar与Camera融合方法,高度依赖激光雷达数据的稳定,在Lidar产生故障时,融合框架基本瘫痪!BEVFusion不依赖于激光雷达数据的输入,从而解决了以前方法的缺点,性能SOTA! 关注公众号【自动驾驶之心】: 回复【领域综述】获取自动驾驶全栈近80篇综述论文! 回复【ECCV2022】获取ECCV2022所有自动驾驶方向论文! 回复【数据集下载】获取计算机视觉近30种数据集!
打开封面
下载高清视频
观看高清视频
视频下载器
大火的BEVFusion算法详解
LiDAR-Camera多传感器融合!StradVision X VUERON Technology
多传感器标定概述(Lidar/Radar/Camera/IMU/鱼眼相机)
IROS2022 | 毫米波雷达和相机融合在高分辨率和远距离深度成像中的探索
自动驾驶仿真框架CARLA教程(3):Car Agent强化学习环境
看完缓解了我的技术焦虑!自动驾驶的产线标定以及标定间标定方法
适用任意相机模型!高通提出的BEV分割框架DaF-BEVSeg来了
上交&诺亚最新 | 大幅提升!OccGen:面向自动驾驶的生成式多模态3D占用预测
实战超详细!Radar、Lidar和前置Camera的标定
【CVPR 2024】刷爆榜单!SAFDNet:纯稀疏点云检测问鼎Waymo
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
讲明白了!端到端算法评估指标详解
牛的!大佬是如何几分钟聊透时空联合规划框架的?
83FPS,史上最快 | IA-SSD: 基于point方式的高效激光雷达点云3D目标检测网络(CVPR2022)
多传感器标定的工具箱有哪些?
恶劣天气可拿捏不了我的鲁棒性!AAAI大佬来助攻
多障碍物联合预测!理论全搞定~
UC伯克利最新!S3Gaussian:全球首个开源的自动驾驶场景3D GS工作
ECCV2022最新 | 缺少点云数据?LiDARGen生成真实的激光雷达点云
IROS2022最新 | 基于激光雷达的三维运动目标分割的高效时空信息融合
ECCV2022 | Box2Mask:强!mAP-50达到全监督97%!
自动驾驶多传感器数据融合(4):多目标跟踪算法
分类突破!自动驾驶中的Occupancy感知方法分类
拯救你的CUDA!什么是bank,为什么会发生bank conflict???
UZH最新博士论文!事件摄像机的数据驱动方法
传感器融合教程 Part 1 - 3D目标检测概述(3D Object Detection Overview)
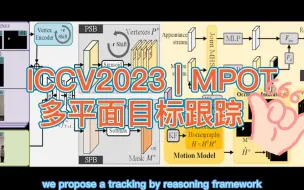
ICCV2023 | MPOT:多平面目标跟踪
端到端模型上车了!GraphAD:国内首个可实车量产部署的端到端建模范式
自动驾驶假数据效果逆天了!Panacea:如何生成全景可控BEV感知数据?
自动驾驶中的多传感器融合有什么优势?如何快速入门到进阶?
超越Lidar?聊一下4D Radar在自动驾驶中的优势和应用!
BEVCar:SOTA!RV融合完成地图和分割双任务
世界模型!特斯拉CVPR2023 Workshop!
BEVPool是什么?实际工程应用中如何加速!!!深度解析
端到端自动驾驶:SparseDrive 算法详解
冠军分享!QCNeXt:面向下一代多智能体联合轨迹预测新框架(CVPRW2023)
车道线方案第一名!OpenLane Topology自动驾驶挑战赛(CVPRW2023)
特斯拉的4D自动标注详解!为什么无标注数据work?
『汽车人有话说』试驾都要排队的小米,自动驾驶到底行不行
大幅超越SuperGlue!ICCV2023最新端到端特征匹配方法