V
主页
[NeRF又一大神作,实时渲染、NeRF光照、编辑以及物理模拟] 几位google创始大神再发新作BakeSDF,60fps以上实时渲染,并支持编辑与物理模拟
发布人
BakedSDF: Meshing Neural SDFs for Real-Time View Synthesis Lior Yariv(Weizmann Institute of Science, Israel and Google Research), Peter Hedman (Google Research), Christian Reiser (Tübingen AI Center, Germany and Google Research), Dor Verbin, Pratul P. Srinivasan, Richard Szeliski, Jonathan T. Barron, Ben Mildenhall (Google Research) 项目主页:https://bakedsdf.github.io/ We present a method for reconstructing high-quality meshes of large unbounded real-world scenes suitable for photorealistic novel view synthesis. We first optimize a hybrid neural volume-surface scene representation designed to have well-behaved level sets that correspond to surfaces in the scene. We then bake this representation into a high-quality triangle mesh, which we equip with a simple and fast view-dependent appearance model based on spherical Gaussians. Finally, we optimize this baked representation to best reproduce the captured viewpoints, resulting in a model that can leverage accelerated polygon rasterization pipelines for real-time view synthesis on commodity hardware. Our approach outperforms previous scene representations for real-time rendering in terms of accuracy, speed, and power consumption, and produces high quality meshes that enable applications such as appearance editing and physical simulation.
打开封面
下载高清视频
观看高清视频
视频下载器
【PS/Switch】物理模拟建造游戏《围攻/Besiege》将于2024年12月12日登陆
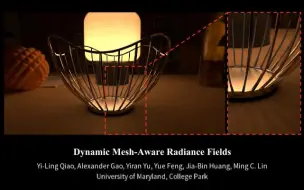
[动态NeRF进展]马里兰大学提出DMRF,一种在渲染和模拟中混合了Mesh和NeRF的方法,提出了光源、阴影和物理模拟的可实时交互方法,在网格插入取得良好效果
[NeRF进展,带纹理的Mesh重建] 北京大学、百度提出NeRF2Mesh,优化现有Mesh重建方法,达到更好的Mesh效果、实时的渲染效果和后期处理能力
[NeRF进展,动态系统建模,优于D-NeRF] UCLA、MIT、马里兰大学等提出Pac-NeRF,从多视角视频中提取高动态优物体的几何与物理参数信息
[NeRF进展,高质量快速训练、1080P实时渲染] INRIA,MPI等推出3D Gaussian Splatting,使用3D高斯表达场景和快速可见感知渲染
[NeRF进展,实时动态、静态6-DoF视频渲染]CMU, Meta等联合推出HyperReel,在低内存消耗下,实现实时的、高质量的、高分辨率的体渲染方法
[NeRF进展,移动实时渲染方向]Snapchat与东北大学联合推出MobileR2L,在移动设备上实时、低消耗、高质量地渲染NeRF三维场景,移动应用有突破
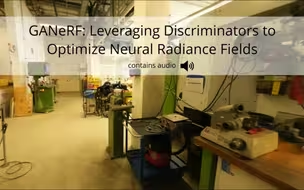
[NeRF进展,效果提升] TUM与Meta推出GANeRF,使用GAN来解决视角观察缺陷以及小的光照变化带来的重建质量不佳问题,提升1.4dB以上
[3DGS进展] UCSD,nVidia,伯克利提出CF-3DGS,连续处理视频帧数据,在剧烈相机运动的情况下渐进重建整个场景
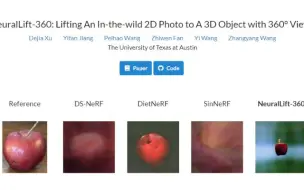
[NeRF进展,单图片成3D内容] 德克萨斯大学奥斯丁分校提出NeuralLift-360,使用单图生成3D物体
[NeRF进展,Relighting方向] 浙江大学,MSRA等提出一种新的可重光照的NeRF的表达,通过向MLP提供多种hint,实现不同光照效果
【荒野大镖客2MOD】逼真的布娃娃系统和物理模拟
[NeRF进展] MPI提出NeuralClothSim,一种使用Kirchhoff-Love布料模拟方法,将表面变化过程编码到神经网络中,实现更好的模拟效果
[NeRF进展] 图宾根大学、Google提出Binary Opacity Grids,加强版本BakedSDF,生成视图质量更高,移动设备场景实时渲染
[NeRF, 复杂场景合成与控制] 香港中文大学、Snapchat、香港科技大学、浙大、UCLA等提出DisCoScene,在复杂场景上合成、编辑和操控物体
[NeRF进展,场景天气风格化渲染]UIUC、浙江大学,马里兰大学提出ClimateNeRF,在NeRF场景中融合天气物理渲染,实现真实感天气场景渲染效果
UE5中的真实光照工作流程
[文本转3D进展] 清华、人大等:ProlificDreamer,使用VSD解决过饱和、过平滑、低多样性问题,SDS是VSD的特殊情况,可应用在NeRF生成场景
[NeRF编辑进展,开源] Seal-3D(浙江大学CS&AUS, CAD&CG实验室),一种可让用户自由在像素级别NeRF编辑的方法,并可实时预览编辑结果
iOS18重要功能-实时语音留言
【Doodle Engine】从零开始的小引擎开发
[NeRF进展,稀疏视角重建] 斯坦福,Google, SFU提出SCADE,使用cIMLE和space carving方法,提升稀疏无约束室内NeRF重建效果
[NeRF进展] Oppo, Buffalo, 上科大提出NeuRBF,使用自适应的RBF进行神经场表达,相比INGP, TensoRF等取得更好的渲染效果
[NeRF进展,单图实时3D画像] UCSD, nVidia,斯坦福提出LP3D,使用无姿态单图,实时推理和渲染真实感3D表达,合成高质量3D画像
[NeRF进展,严重相机pose错位重建,强于BARF] 西安交通大学、蚂蚁金服、腾讯AI Lab提出L2G-NeRF,使用局部-全局优化相机严重错位重建问题
[NeRF进展,交互编辑方向] Inria, 马克斯普郞克学院提出NerfShop,使用基于Cage变形的方法进行物体的交互式选择与编辑,进一步推动实用
[NeRF进展,TensoRF+PBR] 浙江大学、UCSD等提出TensoIR,将场景以神经场与密度、法向、光照、材质等信息一起建模,实现高质量建模
[NeRF+点云,点云渲染] 香港中文大学、思谋科技提出Point2Pix,使用NeRF将点云渲染为真实感图像的方法,并可完成点云inpainting和上采样
[NeRF进展,实时流建模] 斯坦福大学提出NeRFBridge,将机器人操作系统ROS与nerfstudio桥接,实时在线流式训练NeRF模型
[NeRF进展,实时建图] 中山大学、香港科技大学提出H2Mapping,第一个基于NeRF构建在可手持设备上运行的建图方法,效果优于NICE-SLAM
[NeRF进展,雾状鬼影消除] 伯克利提出NeRFBusters,使用3D Diffusion模型,对随意捕捉的NeRF去除雾状鬼影
[NeRF进展] 多伦多大学,SFU,Google和Adobe提出Bayers' Rays,在预训练的NeRF里预测不确定性,清除由不完整或遮挡造成的重建缺陷
[NeRF进展,编辑方向] 三星多伦多AI中心,多伦多大学,约克大学等:SPIn-NeRF,可快快速完成3D Segmentation和Inpainting任务
UE5实时渲染 实时布料解算
[NeRF+Diffusion进展] nVidia,多伦多大学等推出NeuralField-LDM,使用神经场和生成模型解决复杂开放世界3D场景的建模和编辑能力
每日一玩【NERF】“蛟龙改”MEGA发射器
[NeRF进展,自动驾驶,群友工作] 清华大学AIR等12家机构推出MARS,一个基于NeRF的自动驾驶模拟方法,实例感知建模,高度模块化,高度真实感,开源
[NeRF,场景语义建模与应用]Meta提出SSDNeRF,首个通用NeRF场景语义分割方法,将场景按语议分割建模,让NeRF二次编辑、丰富动画场景变为可能
[可泛化GS重建] 华中科技大学、南洋理工等提出MVSGaussian,一种从MVS快速的可泛化的GS重建方法,可以有效、通用地重建未见的场景,并达到实时渲染
[NeRF进展,时变3D模型] 浙大,康奈尔,特拉维夫提出neusc,使用网上地标照片,重建可独立控制视点、光照和时间的真实感时变三维模型