V
主页
213 四旋翼无人机轨迹跟踪 预设时间预设性能约束 反步法 自适应动态面 障碍李亚普诺夫函数完成了上述所有算法,有公式推导和 simulink 仿真
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
【自制】欠驱无人船 自适应神经网络 固定时间 轨迹跟踪控制 直线+圆形轨迹跟踪
【自制】欠驱无人船 自适应神经网络 固定时间 轨迹跟踪控制 直线+圆形轨迹跟踪simulink
TAC: 多目标跟踪 时变编队 多目标围捕
顶刊 TNNLS 复现:基于强化学习的机械臂固定时间轨迹跟踪控制
【自制】多智能体 三维编队 避障 改进人工势场法 编队一致性 编队避障matlab代码+完整公式推导 (全网唯一)
单向拓扑下异构车辆队列的分布式模型预测控制局部开环最优控制问题,代价函数,终端约束,Lyapunov稳定性
基于状态空间模型预测控制的四旋翼路径跟踪实现 (文档+仿真 NMPC )
耦合A星 DWA路径规划算法 动态障碍物
136 数据驱动分布鲁棒MPCpython 代码
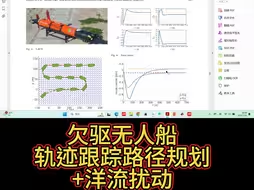
trans:欠驱无人船轨迹跟踪 路径规划 处理洋流扰动
210:cyber 无人船优化反步控制 轨迹跟踪 强化学习Actor-critic架构,李雅普诺夫稳定性,优化反布控制,强化学习(RL),水面舰艇
2022 OE-基于Q学习和数据驱动的无人船舶航向控制和轨迹跟踪 文献+ PYTHON 复现
四旋翼轨迹跟踪PID控制及位置环 PID 控制 姿态环滑模控制8 字 三维8 字 螺旋上升三种轨迹包含公式说明文档
四旋翼无人机轨迹跟踪预定义时间事件触发滑模控制(文献+simulink仿真)
顶刊:无人船轨迹跟踪 优化反步控制 强化学习 Actor-critic算法
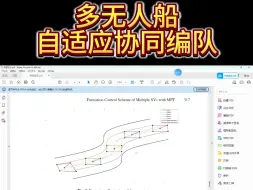
多无人船编队 模型预测控制 自适应强化学习#无人船编队 #MPC #自适应强化学习#论文复现
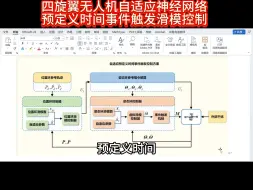
四旋翼无人机自适应神经网络预定义时间事件触发滑模控制
航天器 时变滑模 自适应控制 饱和控制器 考虑推力器安装偏差
205 悬挂式移动机器人的多约束避障轨迹规划文献+matlab 仿真
TAC:事件触发 自适应 状态跟踪控制线性部分时变连续时间(CT)系统,模型参考自适应控制(MRAC),非线性状态相关匹配参数不确定性
基于中继的无人机协同通信应急优化部署策略(代码)可进行科研指导
时变编队,多智能体系统,二部图,分布式控制,协同控制文献+matlab 复现代码
基于观测器的非线性多智能体时变队形自适应跟踪 文献+MATLAB 代码
基于观测器的单侧Lipschitz非线性多智能体系统时变队形自适应跟踪(文献+matlab 代码)
第二期:带你从零开始搭建一架四旋翼飞行器
【自制】204 水下AUV三维路径跟踪 避障 MPC
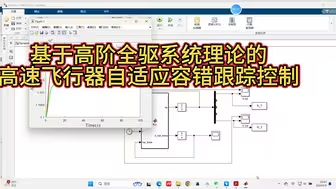
基于高阶全驱系统理论的高速飞行器自适应容错跟踪控制
多智能体系统神经网络自适应动态滑模控制文献+matlab 代码
多移动机器人 事件触发 编队控制(抗干扰 固定时间)考虑非线性系统运动学和动力学自适应固定时间滑模干扰观测器基于事件触发的固定时间编队控制器
多智能体编队 遏制控制MATLAB 代码
多智能体分布式事件触发固定时间一致性控制
TAC3: 多目标跟踪 时变编队队形 多目标围捕 文献+代码
多智能体系统安全自适应强化学习
无人驾驶汽车轨迹跟踪算法
网络移动机器人单曲线瞬态性能增强的路径跟随控制 matlab 仿真程序 移动机器人,投影弧长,增强瞬态性能,基于跟踪微分器的规定性能控制(TDPPC)
TAC:多智能体二部一致性跟踪,预设时间一致性,时变函数
车辆 轨迹规划 自适应模糊控制 数据驱动 论文复现 python
【顶刊复现】欠驱无人船轨迹跟踪+洋流扰动
【自制】水下无人艇三维动态路径规划 避障 模型预测控制
【国防科大学报】基于迭代学习的卫星姿态滑模容错控制 simulink