V
主页
无人驾驶汽车轨迹跟踪算法
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
顶刊 TNNLS 复现:基于强化学习的机械臂固定时间轨迹跟踪控制
TAC: 多目标跟踪 时变编队 多目标围捕
基于高阶全驱系统理论的高速飞行器自适应容错跟踪控制
耦合A星 DWA路径规划算法 动态障碍物
【自制】欠驱无人船 自适应神经网络 固定时间 轨迹跟踪控制 直线+圆形轨迹跟踪
【自制】欠驱无人船 自适应神经网络 固定时间 轨迹跟踪控制 直线+圆形轨迹跟踪simulink
2022 OE-基于Q学习和数据驱动的无人船舶航向控制和轨迹跟踪 文献+ PYTHON 复现
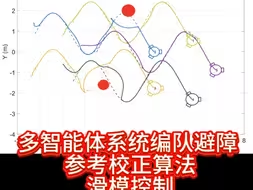
多智能体系统,编队控制,避障,参考校正算法,滑模控制文献+MATLAB 复现代码
TAC:事件触发 自适应 状态跟踪控制线性部分时变连续时间(CT)系统,模型参考自适应控制(MRAC),非线性状态相关匹配参数不确定性
213 四旋翼无人机轨迹跟踪 预设时间预设性能约束 反步法 自适应动态面 障碍李亚普诺夫函数完成了上述所有算法,有公式推导和 simulink 仿真
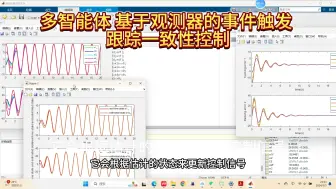
多智能体基于观测器的事件触发跟踪一致性控制
trans:欠驱无人船轨迹跟踪 路径规划 处理洋流扰动
210:cyber 无人船优化反步控制 轨迹跟踪 强化学习Actor-critic架构,李雅普诺夫稳定性,优化反布控制,强化学习(RL),水面舰艇
TAC3: 多目标跟踪 时变编队队形 多目标围捕 文献+代码
多智能体系统安全自适应强化学习
顶刊:无人船轨迹跟踪 优化反步控制 强化学习 Actor-critic算法
TAC:多智能体二部一致性跟踪,预设时间一致性,时变函数
【自制】204 水下AUV三维路径跟踪 避障 MPC
【顶刊复现】欠驱无人船轨迹跟踪+洋流扰动
215:顶刊复现:多智能体有限时间分布式事件触发一致性控制
广交会现场,突然来了一辆无人驾驶汽车,吸引外国客商围观!
IEEE trans:水下机器人AUV的路径规划和基于模型预测控制MPC的跟踪框架
四旋翼无人机轨迹跟踪预定义时间事件触发滑模控制(文献+simulink仿真)
四旋翼轨迹跟踪PID控制及位置环 PID 控制 姿态环滑模控制8 字 三维8 字 螺旋上升三种轨迹包含公式说明文档
基于观测器的单侧Lipschitz非线性多智能体系统时变队形自适应跟踪(文献+matlab 代码)
Cybercab无线充电,高达90%以上效率
基于状态空间模型预测控制的四旋翼路径跟踪实现 (文档+仿真 NMPC )
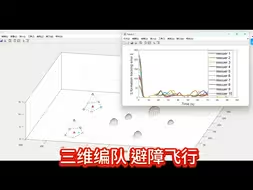
多智能体三维编队 避障飞行
多智能体系统神经网络自适应动态滑模控制文献+matlab 代码
基于观测器的非线性多智能体时变队形自适应跟踪 文献+MATLAB 代码
车辆 轨迹规划 自适应模糊控制 数据驱动 论文复现 python
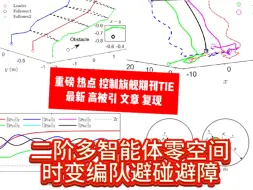
零空间非线性多智能体固定时间时变避碰编队滑模控制
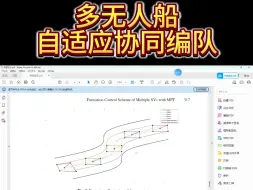
多无人船编队 模型预测控制 自适应强化学习#无人船编队 #MPC #自适应强化学习#论文复现
146 水下无人艇三维路径跟踪+事件触发+模型预测控制包含参考文献和MATLAB 代码
205 悬挂式移动机器人的多约束避障轨迹规划文献+matlab 仿真
多智能体 避碰 轨迹转换 分布式MPC(文献+matlab 代码)
【自制】多智能体 三维编队 避障 改进人工势场法 编队一致性 编队避障matlab代码+完整公式推导 (全网唯一)
Automatica2: 移动机器人分布式编队控制
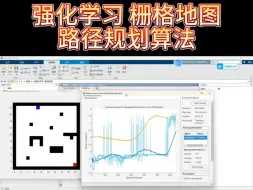
强化学习 栅格地图 路径规划算法 DQN 算法 matlab
FSD V12.5遇到前方磨唧汽车会被卡住吗?