V
主页
京东 11.11 红包
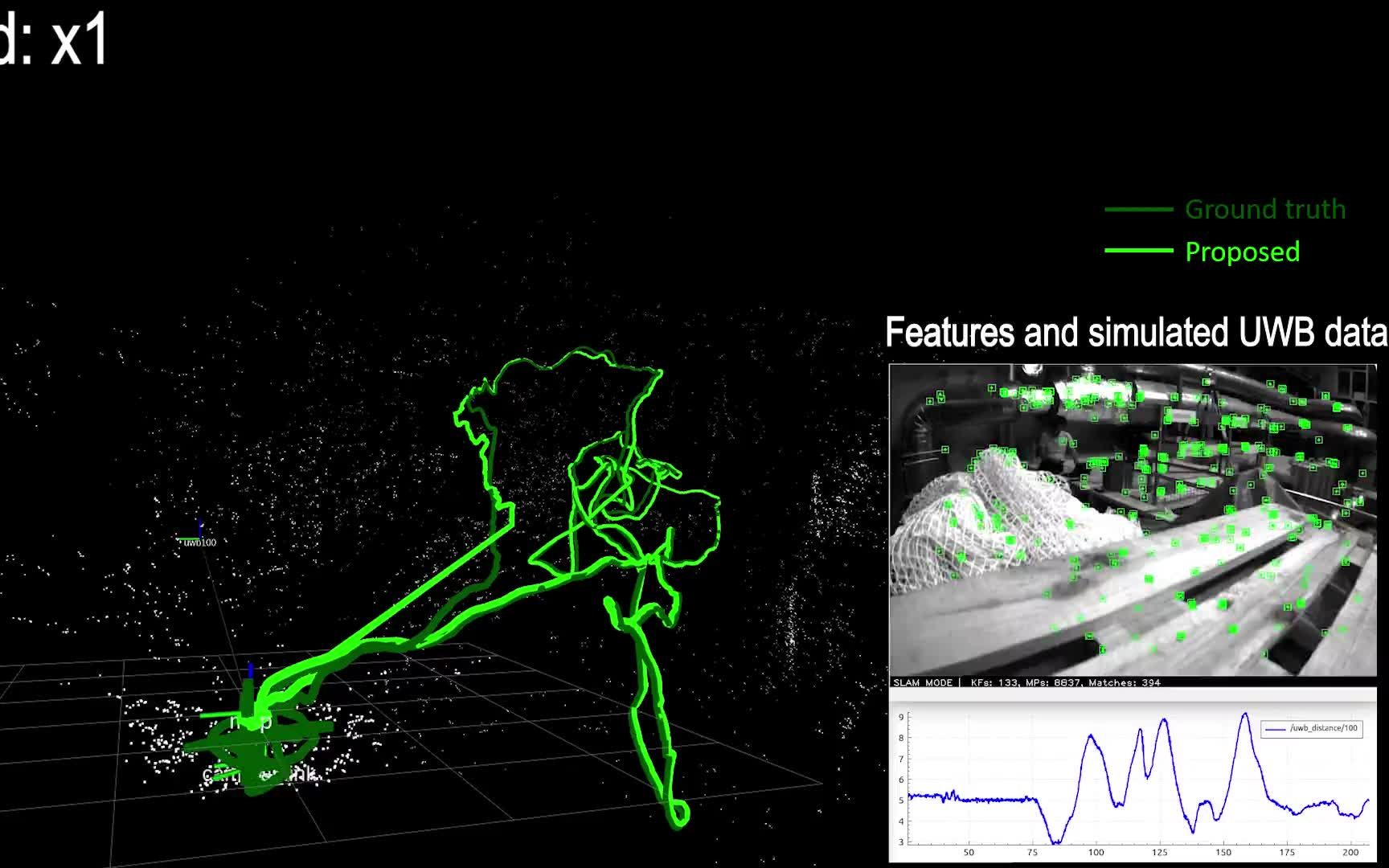
【ICRA2020】紧耦合单锚超宽带辅助单目视觉里程计
发布人
在这项工作中,我们提出了一个紧密耦合的里程计框架,该框架将单目视觉特征观测与单个超宽带(UWB)锚提供的距离测量结合起来,并对其位置进行初步猜测。首先,采用Levenberg-Marquardt非线性最小二乘优化方案,同时估计视觉框架中的尺度因子和锚点位置;一旦获得了比例尺,视觉特征图就会用新的比例尺进行更新。滑动窗口中随后的测距误差被连续监测,估计过程将被重新初始化以改进估计。最后,在需要时将距离测量和锚点位置估计融合到位姿图优化方案中,以最小化地标重投影误差和距离误差,从而减少视觉漂移
打开封面
下载高清视频
观看高清视频
视频下载器
【ICRA2021】直接稀疏双目视觉-惯性全局里程计
【ICRA2020】变化的城市场景下激光雷达惯性里程计辅助的鲁棒激光雷达定位系统
木吒-视觉里程计和SLAM
5-1 特征点提取与匹配
【ICRA2021】LIRO:紧耦合激光雷达惯性里程计
【ICRA2020】基于分层四叉树特征光流跟踪的稀疏位姿图视觉惯性SLAM
【ICRA2021】快速高效地探索大型复杂环境
Moveit!
【ICRA2021】LVI-SAM:紧耦合的激光雷达-视觉-惯性里程测量,通过平滑和建图
【ICRA2021】单目视觉里程计深度在线校正
【ICRA2021】紧密耦合激光雷达视觉惯性里程表的统一多模态地标跟踪
港科技最新SLAM数据集!SLABIM:香港科技大学主楼SLAM-BIM耦合数据集
【ICRA2021】单目直接视觉里程计中基于特征的重定位的紧密集成
视觉算法在Rokid
【ICRA2021】强度SLAM:大规模环境的强度辅助定位和建图
【ICRA2021】基于平面几何的单目视觉里程计准确鲁棒的尺度恢复
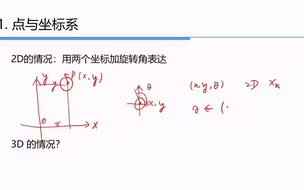
2-1 点与坐标系
【ICRA2021】3647-使用相对深度先验的偏振单目稠密建图
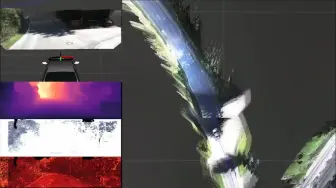
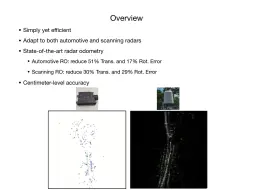
【ICRA2021】为扫描雷达和车载雷达设计的基于正态分布变换的雷达里程计
【4K画质】LIO-SAM:紧耦合的实时激光雷达惯性里程计和建图
DA4AD-基于端到端深度注意的自动驾驶视觉定位
【ICRA2021】4028-移动机器人全局-局部耦合两阶段路径规划方法
【ICRA2021】自动驾驶汽车的轻量级语义网格建图
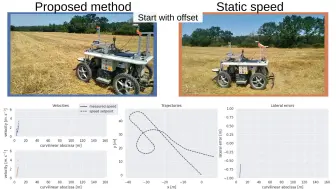
【ICRA2021】轮式越野移动机器人的在线速度波动:一种强化学习方法
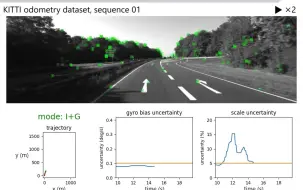
【ICRA2021】CodeVIO:具有学习优化密集深度的视觉惯性里程计
【ICRA2020】不同运动特性下基于不确定性的视觉惯性里程计自适应传感器融合
【ICRA2020】在极端变化的条件下学习基于形状的视觉定位
1-4 Linux下的C++基础
【ICRA2021】3485-R-LOAM:利用已知三维参考对象的点到网格特征改进激光雷达里程计建图
【ICRA2021】用rf参考单目视觉征服无纹理的MAV状态估计
【ICRA2020】基于视觉车道标记和拓扑地图匹配的车辆定位
高翔-大规模点云地图的自动化构建
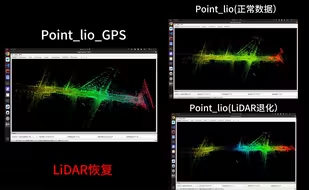
Point_lio_gps解决LiDAR退化导致的里程计漂移。
ORB-SLAM3- TUM-VI Monocular-Inertial, Slides3
ORB-SLAM3- TUM-VI Stereo-Inertial, room1+outdoors1+outdoors8
【MATLAB】自主导航
AVP-SLAM- 停车场内自主车辆的语义视觉地图构建与定位
2-2 旋转矩阵
有缘人见(下)
【ICRA2020】面向无地图导航的离散深度强化学习