V
主页
京东 11.11 红包
1-4 Linux下的C++基础
发布人
资本主义坏,且看且珍惜
打开封面
下载高清视频
观看高清视频
视频下载器
1-1课程内容与预备知识
定位毁了七日杀
【ICRA2021】3475-OV2SLAM:用于实时应用的完全在线和通用的视觉SLAM
2-2 旋转矩阵
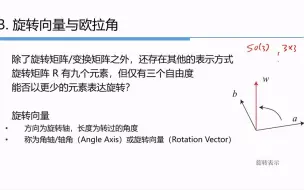
2-3 旋转向量和欧拉角
1-3 视觉SLAM的数学描述
ORB_SLAM3实跑教程
5-1 特征点提取与匹配
【ICRA2021】单目直接视觉里程计中基于特征的重定位的紧密集成
有缘人见(下)
【ICRA2021】强度SLAM:大规模环境的强度辅助定位和建图
ORB-SLAM3- TUM-VI Monocular-Inertial, Outdoors6
【ICRA2021】固态激光雷达的轻型三维定位和建图
【ICRA2021】自动驾驶汽车的轻量级语义网格建图
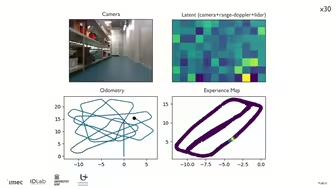
【ICRA2021】LatentSLAM:用于定位和建图的无监督多传感器表示学习
【ICRA2021】3732-RigidFusion:大型动态刚体环境中的机器人SLAM
【SLAM】高翔-视觉SLAM十四讲 配套视频
概率机器人
【ICRA2021】PSF-LO:基于参数化语义特征的激光雷达里程计
【ICRA2021】半动态环境中的终身定位
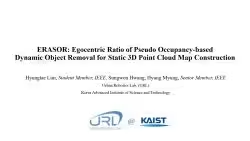
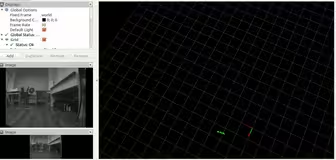
【ICRA2021】3508-ERASOR:一种基于栅格占据情况之差异的动态物体过滤方法
【ICRA2021】UVIP:用于复杂室内环境的强大的 UWB 辅助视觉惯性定位系统
【ICRA2021】视觉惯性里程计的等变滤波器
【ICRA2021】动能缓冲器避障
【SLAM】LoopSplats:通过直接的3DGS注册,实现密集建图和在线回环检测的全局一致性图优化
ROS基本概念与ROS架构
基于深度学习特征的长期视觉定位框架
ORB-SLAM3- TUM-VI Monocular-Inertial, Slides3
【ICRA2021】直接稀疏双目视觉-惯性全局里程计
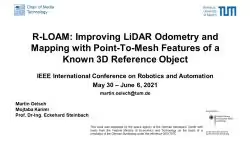
【ICRA2021】3485-R-LOAM:利用已知三维参考对象的点到网格特征改进激光雷达里程计建图
GS-LIVOM (Environment Guideline)
ROS与无人赛车RaceCar
【浙大谭平】从相机标定到视觉SLAM
【ICRA2021】MaAST:使用语义转换器进行地图注意力以实现高效的视觉导航
【ICRA2021】S3Net:3D LiDAR 稀疏语义分割网络
weka从入门到放弃
【ICRA2021】相机IMU UWB的距离聚焦融合用于精确和减少漂移的定位
【ICRA2021】3767-通过增量采样和概率路线图对动态环境进行自主UAV探索
浙江大学-机器学习从入门到放弃
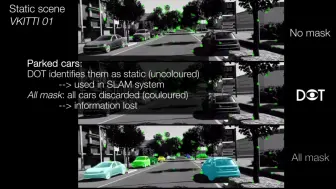
【ICRA2021】DOT:视觉 SLAM 的动态对象跟踪