V
主页
【ICRA2020】在极端变化的条件下学习基于形状的视觉定位
发布人
对于导航和增强现实等应用程序来说,视觉定位是一项重要的任务,但当场景在白天、季节或环境中发生变化时,这是一个具有挑战性的问题。在本文中,我们提出了一种基于卷积神经网络(CNN)的方法,用于在正常到剧烈的外观变化(如灾难前和灾难后的情况)之间进行视觉定位。我们的方法旨在解决两个关键的挑战:(1)减少传统cnn基于场景纹理的偏差,我们的模型通过对程式化图像的训练来学习基于形状的表示;(2)为了使模型对布局变化具有鲁棒性,我们的方法使用查询图像的估计主导平面作为近似场景坐标。
打开封面
下载高清视频
观看高清视频
视频下载器
5-1 特征点提取与匹配
【小白教程】使用 PSMNet 估计视差和计算双目深度,并映射到 3D 点云
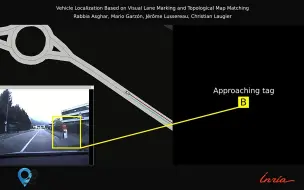
【ICRA2020】基于视觉车道标记和拓扑地图匹配的车辆定位
AVP-SLAM- 停车场内自主车辆的语义视觉地图构建与定位
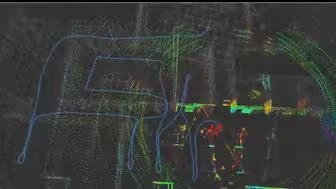
【ICRA2021】强度SLAM:大规模环境的强度辅助定位和建图
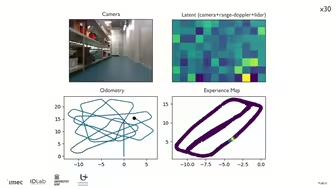
【ICRA2021】LatentSLAM:用于定位和建图的无监督多传感器表示学习
视觉SLAM的本质多视图几何
【ICRA2020】基于物理的定位、校准和跟踪连续波激光雷达仿真
ORB_SLAM3实跑教程
【ICRA2020】基于分层四叉树特征光流跟踪的稀疏位姿图视觉惯性SLAM
大疆livox-mid360定位
邹丹平-城市拒止环境下的视觉SLAM
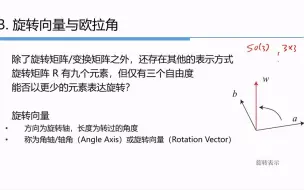
2-3 旋转向量和欧拉角
视觉SLAM算法入门必备基础知识
【SLAM】【VIO】双目视觉+超强大的三维感知能力【应用场景——办公室内】“定位&导航规划”“实测”【传感器】
机器人自助定位导航之路的探索
1-4 Linux下的C++基础
【ICRA2020】基于图卷积网络学习3D感知的以自我为中心的时空交互
【ICRA2021】挑战性条件下域不变局部特征的自监督学习鲁棒视觉定位
【3D数学】欧拉角万向节死锁与插值
【ICRA2021】3475-OV2SLAM:用于实时应用的完全在线和通用的视觉SLAM
【ICRA2021】固态激光雷达的轻型三维定位和建图
2-5 实战环节
【ICRA2020】傅里叶梅林软件三维非均匀部分重叠扫描配准的分治方法
【ICRA2021】自动驾驶汽车的轻量级语义网格建图
【SLAM】高翔-视觉SLAM十四讲 配套视频
【ICRA2021】里程计辅助视觉惯性 SLAM 的双向轨迹计算
搞SLAM算法为什么要学李群和李代数
【SLAM】【VIO】双目视觉+超强大的三维感知【室外高速工作场景】“实测”
【ICRA2020】基于共享2D-3D嵌入空间的LiDAR地图全局视觉定位
微型无人机群SLAM
【SLAM】【VIO】双目视觉+超强三维感知力【功能演示——半稠密点云】“实测”
3-1 群
[ICRA 2024] GCM
【ICRA2021】3732-RigidFusion:大型动态刚体环境中的机器人SLAM
【ICRA2021】用于特定领域重定位的同步多级描述符学习和语义分割
有缘人见
【ICRA2021】3505-MOLTR:单目RGB视频的多目标定位、跟踪和重建
【ICRA2021】3508-ERASOR:一种基于栅格占据情况之差异的动态物体过滤方法
【ICRA2020】不同运动特性下基于不确定性的视觉惯性里程计自适应传感器融合