V
主页
高斯抛雪球SLAM
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
SparseGS:3DGS实时360度稀疏视角合成
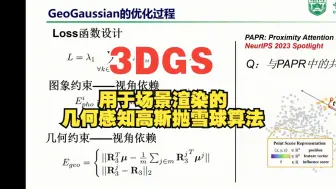
用于场景渲染的几何感知高斯抛雪球算法
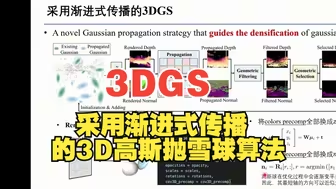
采用渐进式传播的3D 高斯抛雪球算法
SLAM里程碑!戴森机器人实验室最新开源:3D GS杀入SLAM!
Splatam:用于稠密RGB-D SLAM的3D高斯的溅射、跟踪和建图
CVPR'24开源|NeRF-SLAM新SOTA:请任意选择你的高效神经
SGS-SLAM:神经密集SLAM的语义高斯飞溅
【较真系列】讲人话-3d gaussian splatting全解(原理+代码+公式)【2】 抛雪球
大作业|激光-视觉-IMU-GPS融合SLAM算法
3.9k star!2张图片重建稠密3D场景!竟然还不需要相机内参!
三维点云系列视频——第一章绪论
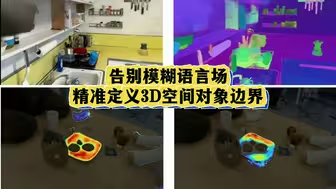
CVPR 2024 Highlight【清华、哈佛】|LangSplat:3D语言高斯溅射,告别模糊语言场,精准定义3D空间对象边界
如何学习NeRF/3DGS-SLAM?(公开课直播回放)
CoherentGS:从稀疏的输入图像中重建高质量的3D场景
激光-视觉-IMU-GPS融合SLAM系列课程-传感器介绍与代表性SLAM解析
3DGS进化,高效高质量的GaussianPro来袭!
上海 AI Lab&同济大学!基于八叉树结构的3D高斯体渲染方法,实现一致的实时渲染性能
MIT重磅开源!别再用COLMAP了!FlowMap给你最精确的SfM!
ORB-SLAM3基本原理与系统架构
AI三维高斯溅射:“苏州之眼”诞生记
(公开课)视觉SLAM原理与ORB-SLAM3系列算法
107 FPS!开源!结合ICP和3D GS构建最快的稠密SLAM!
高速结构光三维面形测量方法
RAL 2023开源 第一个基于NeRF的实时LiDAR SLAM!
当MVS遇上Gaussian MVSGaussian 快速、可泛化的高斯重建框架!-上篇
CVPR'24 XScale-NVS 基于哈希特征流形的大场景跨尺度高分辨神经渲染-上篇
【3D视觉工坊】第七期公开课:图像对齐算法
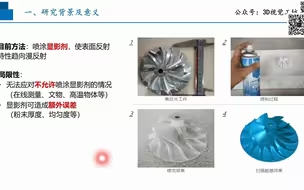
高反光表面三维视觉测量方法
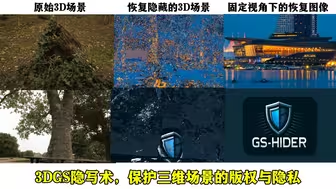
3DGS隐写术—GS-Hider,用以保护三维场景的版权与隐私【可在主页预约与3DGS相关的两场直播公开课】
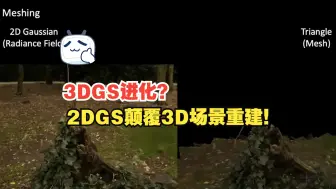
3DGS进化?2DGS颠覆3D场景重建!
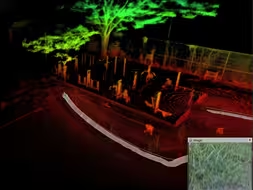
地面重建测试 | DLIO+UFOMap
MIT最新突破!SplaTAM:实现高速SLAM与实时3D渲染的全新方法!
多视图几何MVS简介及MVSNet如何高效入门?
当MVS遇上Gaussian MVSGaussian 快速、可泛化的高斯重建框架!
【较真系列】讲人话-3d gaussian splatting全解(原理+代码+公式)【3】 雪球颜色
香港大学发表超强无人机实时避障算法:以后无人机再也不怕撞了!
让NeRF动起来!PhysGaussian:生成任何物体的真实运动!
无相机姿态40秒重建3DGS方法
清华最新开源万能3D分割一切!
透彻剖析室内外激光SLAM算法与实战系列课程-激光SLAM传感器基本原理