V
主页
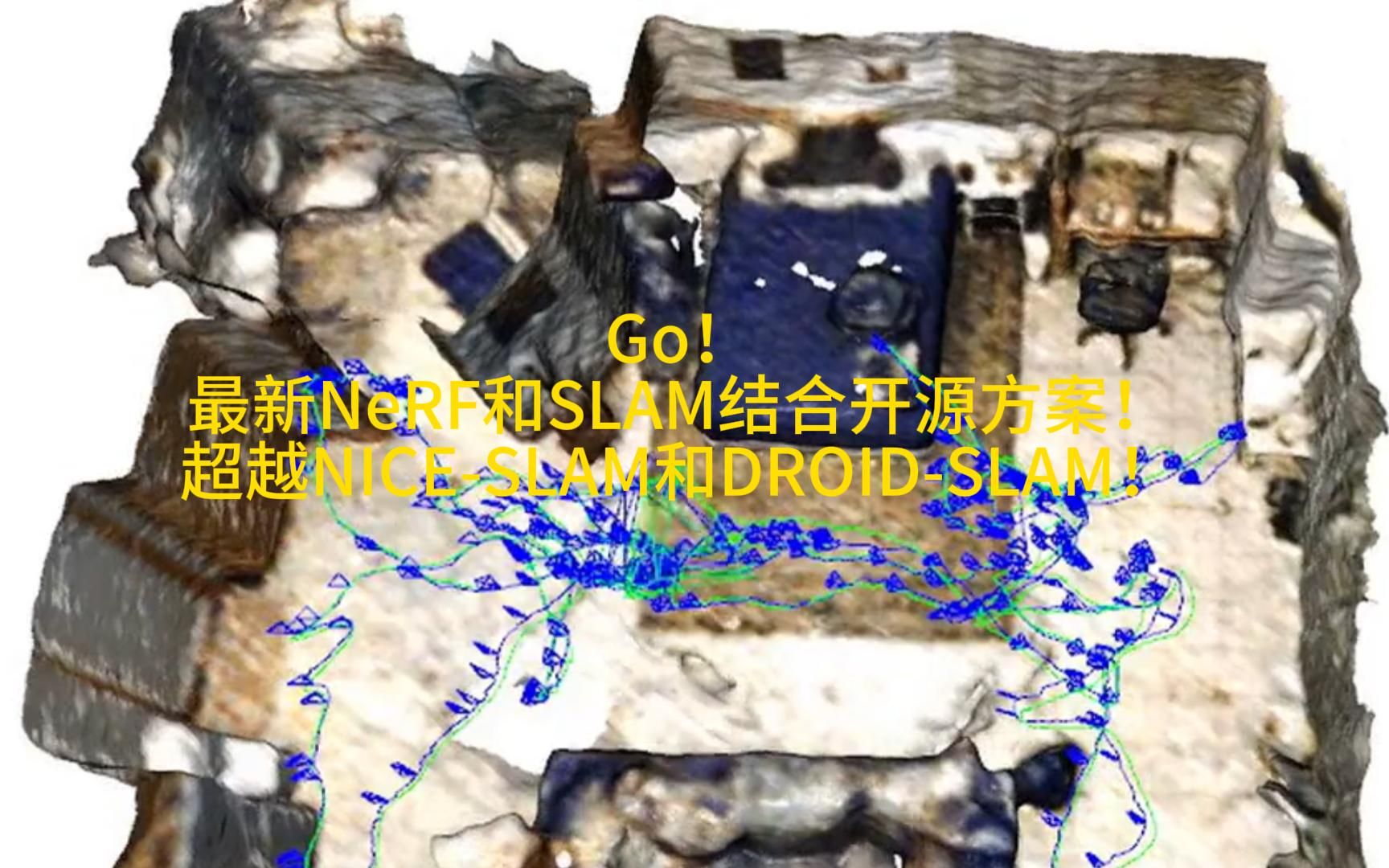
Go!最新NeRF和SLAM结合开源方案!超越NICE-SLAM和DROID-SLAM!
发布人
GO-SLAM主要还是基于NeRF进行稠密重建,可以发现相较于NICE-SLAM这些SOTA方案,GO-SLAM重建场景的全局一致性更好,这主要是因为它引入了回环和全局BA来优化累计误差。对于各种室内场景的3D稠密重建,都取得了相当不错的效果。还有在EuRoC数据集上的定性重建结果。相较于DROID-SLAM,GO-SLAM的重建效果更加干净! 在评论区回复「666」,获取论文和代码链接。@3D视觉工坊 #NeRF
打开封面
下载高清视频
观看高清视频
视频下载器
107 FPS!开源!结合ICP和3D GS构建最快的稠密SLAM!
【成果展示】室外室内实景三维重建、SLAM与精确测量——复杂环境快速勘测与精确三维重建,适用于水电验收,房屋维护、测量取证、数字孪生、建筑保存、复杂地理环境评估
手持slam设备(灵感源自麦克风)
ECCV'24开源 完虐COLMAP!百倍加速!ACEZero:全新SfM革新三维重建!
20+FPS!最新开源!加上回环检测的NeRF SLAM竟是如此精确!
如何学习NeRF/3DGS-SLAM?(公开课直播回放)
MIT重磅开源!别再用COLMAP了!FlowMap给你最精确的SfM!
神经辐射场照亮动态SLAM:构建精细场景地图
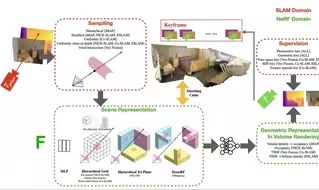
CVPR2024开源NeRF-SLAM新SOTA:请任意选择你的高效神经表征和渲染方程?
英伟达最新开源|EmerNeRF全面基于NeRF的自动驾驶仿真框架无需分割!
【SLAM】【空间计算】RoboBaton系列产品正式亮相【三维重建】【AI赋能】
【卷王必备】这可能是B站目前唯一能将【3D点云+三维重建】讲清楚的教程了,全程干货无尿点,草履虫听了都点头!—人工智能/神经网络/深度学习
用于场景渲染的几何感知高斯抛雪球算法
透彻剖析室内外激光SLAM算法与实战系列课程-激光SLAM传感器基本原理
SGS-SLAM:神经密集SLAM的语义高斯飞溅
3D OPGS高质量成果展示三
NeRF何去何从?GS SLAM到底哪家强?来看看最新的开源方案!
单目视频/图像重建高质量人头数字人
SIGGRAPH'2024|RTG-SLAM:基于3DGS的大尺度场景实时三维重建-上篇
CoherentGS:从稀疏的输入图像中重建高质量的3D场景
面向3D视觉的科研方法 | 论文投稿与流程
SLAM里程碑!戴森机器人实验室最新开源:3D GS杀入SLAM!
透彻剖析室内外激光SLAM算法与实战系列课程-激光SLAM精讲(下)
Splatam:用于稠密RGB-D SLAM的3D高斯的溅射、跟踪和建图
戴森机器人实验室发布SuperPrimitive:三维重建&视觉里程计&深度补全轻松搞定!
ECCV'24开源 | DoubleTake深度估计& 三维重建最强解决方案!
采用渐进式传播的3D 高斯抛雪球算法
重建大师 7.0 OPGS成果细节展示一
神经辐射场(NeRF)在学术界被替代?为何说3D高斯才是未来大势?附9篇必读论文和源码
中科院最新CityGaussian:VRAR时代的城市重建新标杆-上篇
ICML'24开源 !LEO:首个三维世界中的具身通用智能体-上篇
医学图像三维重建Demo OpenCV Qt VTK CT图像三维重建
HeadCraft-超逼真头部细微特征生成!3DMM的革命!
港科大最新 开放词汇3D物体检测新SOTA-CoDAv2p-下篇
四旋翼模型与控制基础
【SLAM】【VIO】室内狭窄空间.三维重建【空间计算】
如何轻松拿捏LIO-SAM-数学基础篇
吊打ORB3!73Hz!南洋理工重磅开源AirSLAM:无惧复杂光照的超强点线视觉SLAM!
高斯抛雪球SLAM
MA-LIO:使用逐点 LiDAR 间不确定性传播的异步多LiDAR 惯性里程计