V
主页
京东 11.11 红包
LVI-SAM|视觉-惯性子系统(VIS)代码精读
发布人
LVI-SAM|视觉-惯性子系统(VIS)代码精读 课程地址:https://ebzbf.xet.tech/s/Uy981 1) 视觉特征提取与匹配 2) IMU预积分 3) 视觉IMU滑动窗口紧耦合优化 4) 边缘化本质剖析 微信:cv3d007,咨询更多。
打开封面
下载高清视频
观看高清视频
视频下载器
激光-视觉-IMU-GPS融合SLAM系列课程-传感器介绍与代表性SLAM解析
LVI-SAM代码实战与评估
CVPR'24开源 | 吊打一切VINS!又快又好的视觉惯性导航系统!
惯性导航简介
【3D视觉工坊】第十六期 视觉惯性SLAM之多约束扩展卡尔曼滤波
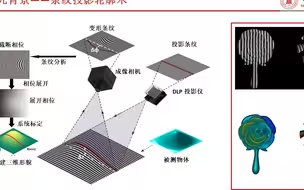
从零搭建一套结构光3D重建系统 [理论+源码+实践]
【3D视觉工坊】第八期公开课:立体视觉之立体匹配理论与实战
视觉快速定位与实时稠密简图简介
自动驾驶中的视觉感知技术
如何轻松拿捏LIO-SAM-数学基础篇
3D视觉应用-现代智慧农业
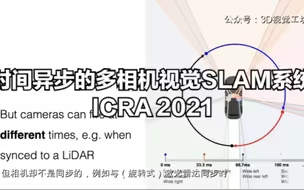
ICRA2021,时间异步的多相机视觉SLAM系统,效果大幅提升,更符合实际情况(代码即将开源)
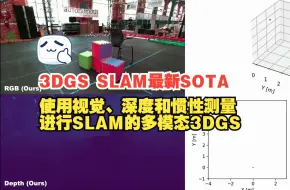
3DGS SLAM最新SOTA | 使用视觉、深度和惯性测量进行SLAM的多模态3DGS
光学3D测量技术原理及应用
点云3D深度学习模型与实践
【3D视觉工坊】第四期公开课:求职经验分享
ICRA2021:基于多模态地标统一跟踪的紧耦合激光-视觉-惯性里程计
【3D视觉工坊】第十三公开课:基于格雷码结合相移技术的高鲁棒性高效率动态三维面形测量
Occupancy的工程细节
大作业|激光-视觉-IMU-GPS融合SLAM算法
四旋翼模型与控制基础
世界上第一个专为无人机集群设计的激光雷达惯性里程计框架
五分钟开发一款自己的点云处理软件(python)
高斯抛雪球SLAM
Snake-SLAM:使用解耦非线性优化的高效全局视觉惯性 SLAM
视觉顶刊IEEE TPAMI2019:基于自监督学习的实时3D姿态识别(代码开源)
【3D视觉工坊】第十四期直播 慕尼黑工业大学博士详解室内SLAM中的几何约束
Nature正刊开源!突破低延迟自动驾驶视觉感知!
四旋翼无人机-PX4控制算法代码
CVPR'24开源 MASA万能匹配一切、跟踪一切!
顶刊论文:LineTR:用于视觉定位的上下文感知线描述符
深度相机概述
用于场景渲染的几何感知高斯抛雪球算法
[IROS2021] 使用镜面反射减少机器人视觉系统中的遮挡
三维点云系列视频——第一章绪论
中山大学最新提出 基于LiDAR-测距-惯性融合的机器人群体协同SLAM系统
GPA:凝视增强感知系统,视觉辅助无人机安全飞行(ICRA2021)
港大火星实验室最新工作:鲁棒性的在线 LiDAR 惯性里程计初始化
无人机-PID算法详解与实战
WACV2023:基于结构光的RGB事件相机(代码开源)