V
主页
ISMAR 2020【最佳论文】商汤提出手机端实时单目三维重建系统!
发布人
ISMAR 2020 | 商汤提出手机端实时单目三维重建系统。与现有的基于RGBD 的在线三维重建 或离线生成表面网格的系统不同,该系统结合前端位姿跟踪 结果,允许用户使用单目摄像头在线重建场景表面网格。 论文:https://ieeexplore.ieee.org/document/9201064 论文作者:杨幸彬、周立阳、姜翰青、唐中樑、王元博、鲍虎军、章国锋
打开封面
下载高清视频
观看高清视频
视频下载器
浙大最新开源!HVOFusion:使用混合体素八叉树进行增量网格重建
CVPR24 最佳学生论文:实现3DGS新突破,任意尺度无锯齿渲染!三名华人学者参与!
论文鉴赏:斯坦福大佬领衔之作, GRM:用于高效三维重建和 生成的大型高斯重建模型
Gaussian-Flow:使用动态3D高斯粒子进行4D重建
ACCV 2020 最佳论文奖开源!
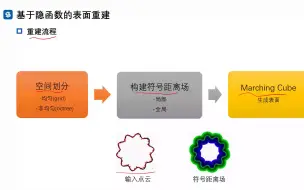
三维重建核心模块:表面重建方法
基于图像的3D重建方法:无需COLMAP的3D高斯Splatting技术
SLAM与三维重建的区别
三维重建入门到精通,30分钟教你学会运动恢复结构SFM
告别3DGS算法,开源SUNDAE,实现内存效率与图像质量的双赢
CT三维重建,三维可视化系统,三维软件开发,断层扫描重建,定制,CT后处理软件,测试,分析
基于点云场景的三维物体检测算法及应用
掌握NeRF(神经辐射场),实现3D场景的渲染与交互,感受更加丰富和立体的视觉体验
最新开源MVSGaussian:基于多视角 立体图像的快速通用高斯溅射重建 训练提速13倍,渲染300+FPS
两张图片即可重建你见到的任何场景
入门三维重建福利!一个视频教你学会三维重建常用软件工具
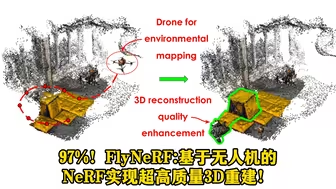
97%!FlyNeRF:基于无人机的NeRF实现超高质量3D重建!
基于神经辐射场的实时稀疏视觉里程计NeRF-VO
实现了一个增量式SFM三维重建pipeline,看看重建效果
火爆全网的NeRF技术到底是什么黑科技,它与三维重建究竟有什么不同
ICRA | 2024:牛津大学针对NeRF和激光雷达的缺点,提出了NeRF融合激光雷达SLAM的大场景重建系统
CT三维可视化(2),三维建模,CT三维重建,CT分割,体积,面积测量,CT后处理
黑神话·悟空爆火,有哪些AI技术在助力?
3D Gaussian Splatting在自动驾驶中的应用——建模动态城市场景
3D Gaussian Splatting再进化,即使是模糊的图像也可以渲染出高保真的3D场景了。
清华最新开源 | 3DGS对多任务机器人操作下手,可让机器人代理通过准确的动作预测完成人类指令
为应对不确定性问题,提出的框架VADv2:通过概率规划实现端到端矢量化自动驾驶
ECCV 2020 | 斯坦福和Adobe联合提出人体姿态估计SOTA新方法
算法原理与代码实践融合讲解的NeRF精品课程:NeRF基础概述
全新的3D编辑算法 —— GaussianEditor, 高效快速实现3D场景增删改!
基于3D高斯渲染技术的高速稠密建图:SplaTAM
与CityDreamer相比速度提高60倍!GaussianCity:重建你的无人机视图与自动驾驶场景【可在主页预约四场与”3DGS ”相关的公开直播课
一镜到底游览西山万寿宫 #三维实景建模 #倾斜摄影 #无人机航测 #黑神话 #三维实景复刻 #三维重建
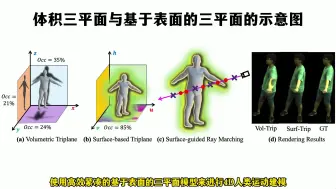
CVPR 2024 | SurMo 革新动态人体渲染技术 实现高效逼真的4D运动模拟
关于3DGS的最新综述,3D重建与新型视图合成
视觉SLAM开源代码论文带读(DSO)
SA-GS:在3D高斯抛雪球中实现SAM任意物体分割,无需任何训练过程和学习参数,通过交互式过程实现3D高斯抛雪球物体分割
基于深度学习的三维重建与位姿估计系统设计 | 孙佳明
MicroDreamer :20s零样本 生成3D mesh,显著降低3D物体 生成的神经网络迭代次数
【三维AIGC】GSD:从单张视图中重建3DGS的扩散模型