V
主页
京东 11.11 红包
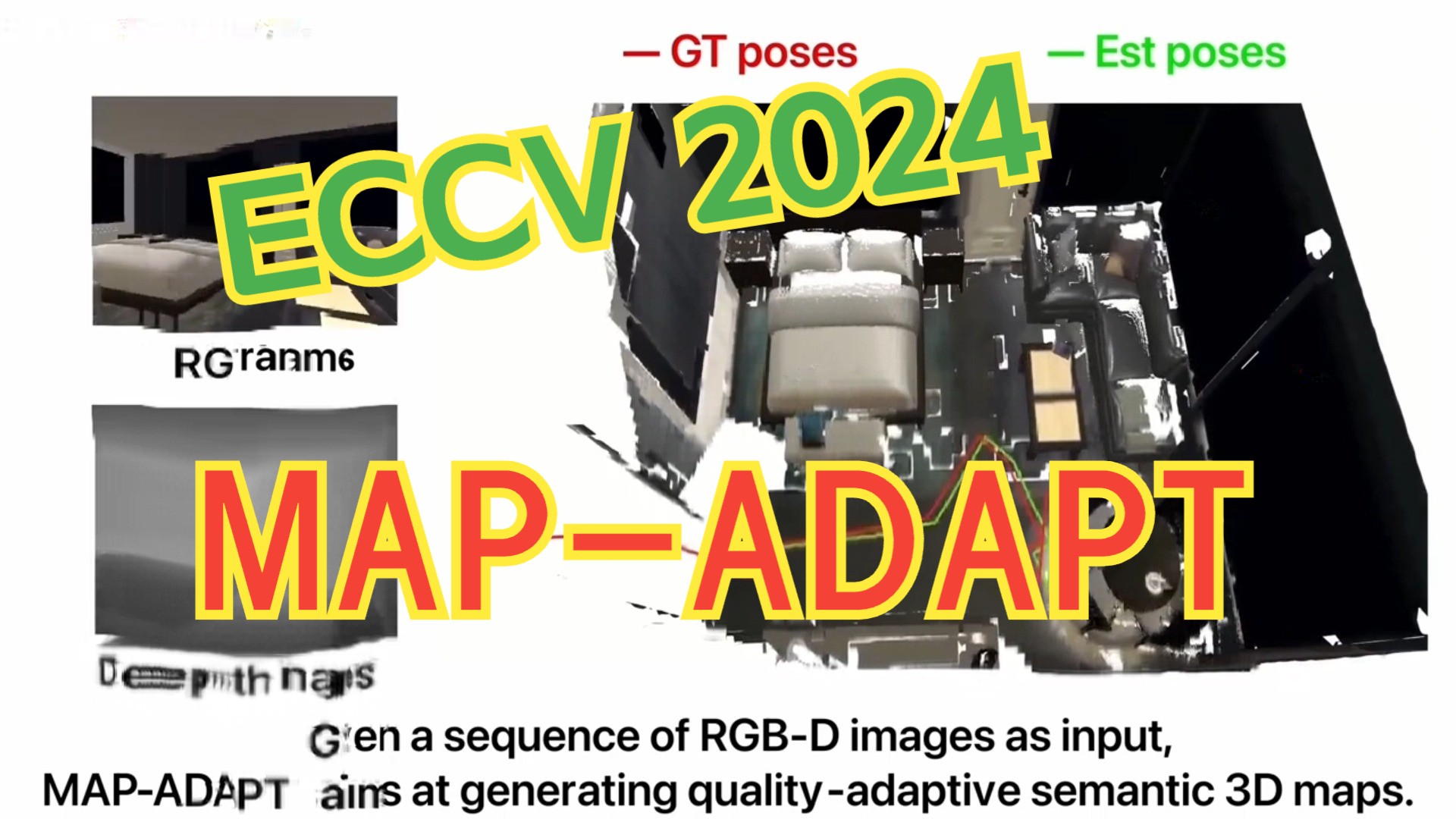
ECCV 2024 | MAP-ADAPT:实时Quality自适应语义3D地图
发布人
创建环境的3D语义重建是许多应用程序的基础,特别是在与自主代理操作相关时(例如,面向目标的导航或对象交互和操纵)。通常,3D语义重建系统以相同的细节级别捕获整个场景。然而,某些任务(例如,对象交互)需要细粒度和高分辨率的地图,特别是如果要交互的对象是小尺寸或复杂的几何形状。在最近的实践中,这导致整个地图具有相同的高质量分辨率,从而增加了计算和存储成本。为了应对这一挑战,我们提出了MAP-ADAPT,这是一种使用RGBD帧进行质量自适应语义3D重建的实时方法。MAP-ADAPT是第一个自适应语义3D映射算法,与先前的工作不同,它根据场景的语义信息和几何复杂性直接生成具有不同质量区域的单个地图。利用语义SLAM管道进行姿态和语义估计,我们在合成和真实世界数据上实现了与最先进的方法相当或更优的结果,同时显著降低了存储和计算要求。
打开封面
下载高清视频
观看高清视频
视频下载器
【ICCV 2023】HAMLET:实时语义分割域自适应方法
StradVision - 语义分割和深度图预测demo
ECCV2024 | 训练45秒,渲染300+FPS!MVSGaussian:高效且可泛化的混合高斯渲染方法
分享实时表情控制整合包,开源,免费,一键启动
【地平线×自动驾驶之心】ICCV 2023最新中稿的端到端自动驾驶框架—VAD!
Maya+Marmoset Toolbag ! 制作实时头发全流程教程丨基础入门!
ICCV2023 | MPOT:多平面目标跟踪
实时动态血糖监测: 一天一餐\一天两餐\一天三餐\一天六餐
【ICCV 2023】RegFormer:点云配准新方案!
ICCV 2023 | CLNeRF:持续学习遇到NeRF
【CVPR 2024】SIN-SLAM:基于神经隐式表征的稠密语义SLAM
【ICCV 2023】 Robust Depth:多种天气条件下的自监督单目深度估计新SOTA
2022年第11号台风(轩岚诺)实时影像
ICCV 2023 | Make it 3D!扩散模型从单个图像生成高保真3D效果
【CVPR 2024】刷爆榜单!SAFDNet:纯稀疏点云检测问鼎Waymo
看完缓解了我的技术焦虑!自动驾驶的产线标定以及标定间标定方法
大幅超越SuperGlue!ICCV2023最新端到端特征匹配方法
【ECCV 2022】清华大学&字节跳动提出 ParticleSfM:从单目视频中估计运动相机的位姿
多传感器融合!BEV感知融合算法介绍
ICCV 2023 | NeO 360: 用于户外场景稀疏视图合成的神经场
RangeDet:基于Range-View的激光雷达3D目标检测网络(ICCV2021)
ECCV 2024 | OMR:基于遮挡感知记忆的视频车道检测优化
轻舟智航最新成果!PillarNeXt:LiDAR点云中的3D检测网络如何设计?
[教程]修改摄像头画面,手机虚拟摄像头软件分享,替换摄像头实时画面
毫米波雷达视觉算法CRAFT,这次彻底理解了!
聊一聊多传感器目标跟踪中的最近邻匹配问题
【国语】UE5.5 在 PS5 上超级逼真实时4K游戏演示
车辆轨迹有多少种玩儿法?CitySim数据集:轨迹预测、仿真、数字孪生应有尽有!
ECCV2022最新 | 缺少点云数据?LiDARGen生成真实的激光雷达点云
【ICCV 2023】 CORE:协作重建助力多智能体协同感知!
【ECCV 2022】最佳论文奖!部分距离相关在深度学习中的多种应用
ICCV 2023 | SparseFusion:基于稀疏表征融合的多模态3D新方案!
LeTS-Drive:自动驾驶中不确定场景下的实时路径规划算法
自动驾驶主流的数据集有哪些?详解Argoverse数据集!
【CVPR 2024】鉴智机器人算法大佬揭秘3D场景流估计的最新工作——3DSFlabelling
ETH突破强化学习壁垒 | PACOH-RL:基于概率模型的元强化学习实现数据高效任务泛化
适用任意相机模型!高通提出的BEV分割框架DaF-BEVSeg来了
女神战败CG 第二集
【ECCV2022】SOTA!MeshLoc:基于网格的视觉定位
看到了这个视频,彻底搞懂了PETR算法!