V
主页
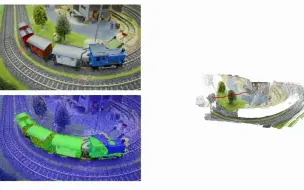
ICCV 2023 | CLNeRF:持续学习遇到NeRF
发布人
论文:https://arxiv.org/pdf/2308.14816 project:https://github.com/IntelLabs/CLNeRF https://www.youtube.com/watch?v=nLRt6OoDGq0
打开封面
下载高清视频
观看高清视频
视频下载器
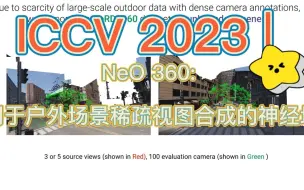
ICCV 2023 | NeO 360: 用于户外场景稀疏视图合成的神经场
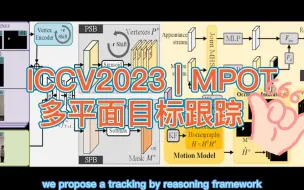
ICCV2023 | MPOT:多平面目标跟踪
ICCV 2023 | 实现实时六自由度物体跟踪,深度主动轮廓模型DeepAC来了
ECCV'24 | Gaussian Grouping解决3DGS的对象级场景理解问题,实现3D场景任意分割和编辑
ICCV 2023 | Make it 3D!扩散模型从单个图像生成高保真3D效果
【ICCV 2023】RegFormer:点云配准新方案!
【ICCV 2023】 Robust Depth:多种天气条件下的自监督单目深度估计新SOTA
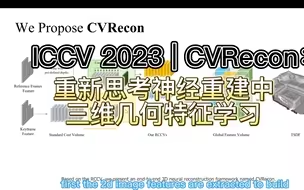
ICCV 2023 | CVRecon:重新思考神经重建中三维几何特征学习
太强了!RenderOcc:仅使用2D标签和Nerf监督视觉Occupancy
Nerf+SLAM会擦出什么样的火花?
【ECCV2022】首篇完全可微NeRF!Neural-Sim:学习使用NeRF生成训练数据(微软)
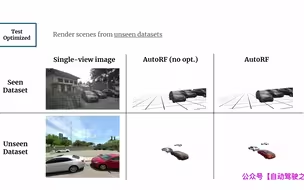
CVPR2022 | AutoRF:从单视角观察中学习3D目标辐射场(nuScenes和KITTI上表现良好)
ECCV2024 | 训练45秒,渲染300+FPS!MVSGaussian:高效且可泛化的混合高斯渲染方法
MonoPLFlowNet:用于单目图像的现实尺度 3D 场景流估计(ECCV2022)
【ECCV 2022】清华大学&字节跳动提出 ParticleSfM:从单目视频中估计运动相机的位姿
机器人神经场的全面综述:详细介绍 其在姿势估计 操控,导航,物理和自动驾驶中的应用 ,潜力,挑战
逆天了!NeRF-Casting:逼真重建和渲染高光泽目标
车道线方案第一名!OpenLane Topology自动驾驶挑战赛(CVPRW2023)
英伟达最新!NeRF XL:将NeRF分布到多个GPU扩展,对任意大容量的NeRFs进行训练和渲染
英伟达提出EmerNeRF:大规模动态自动驾驶场景重建
【ECCV 2022】Google最新视觉主干MaxViT大放异彩:分类准确率再创新高
ICCV 2023 | Point-SLAM:基于密集神经点云的SLAM!
【地平线×自动驾驶之心】ICCV 2023最新中稿的端到端自动驾驶框架—VAD!
透彻!特斯拉occupancy network详解
ECCV 2022最新 | DynamicDepth:无监督多帧单目深度估计新SOTA!
CVPR 2023 | BEVHeight:基于视觉的道路3D目标检测的鲁棒框架
ETH最新!CVPR2024 | GoMVS:多视图几何重建新SOTA
速度提高60倍!重建你的自动驾驶场景 | GaussianCity:无边界三维城市场景重建(南洋理工大学)
CVPR2023 Highlight | Unisim:Nerf+自动驾驶,这不会是魔法吧?
【ICCV 2023】 CORE:协作重建助力多智能体协同感知!
CVPR 2023 | DINER: 基于深度感知图像的神经辐射场
自动驾驶缺少数据怎么办?ChatSim助你生成高度真实的驾驶数据!
逆天了!NeLF-Pro | 一个方法解决多种规模场景的快速渲染重建(CVPR'24)
CVPR 2023最新!基于NeRF监督的深度立体视觉
世界模型!特斯拉CVPR2023 Workshop!
NeRF如何监督Occupancy Networks?
清华大学最新!GaussianFormer:Gaussians进军视觉Occupancy任务!
CVPR 2023 面向自动驾驶场景的纯视觉三维语义占有预测
什么是端到端自动驾驶?什么是基础world model?
超逼真的数据!实时高质量渲染,用于动态城市场景建模的Street Gaussians