V
主页
【CVPR 2024】鉴智机器人算法大佬揭秘3D场景流估计的最新工作——3DSFlabelling
发布人
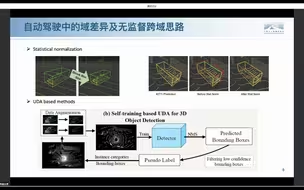
自动驾驶之心邀请来了鉴智机器人的算法工程师—蒋超康!为大家分享3D场景流估计的最新工作3DSFlabelling(CVPR'24)! 主要内容: 1、什么是3D场景流 2、3D场景流指的最近工作和发展趋势 3、3DSFLabelling如何为LiDAR点云注释3D运动流标签? 4、3DSFLabelling的实验结果和分析 欢迎关注【自动驾驶之心】知识星球:https://t.zsxq.com/158XKqNOz,所有直播回放完整版(包括内容+答疑)、自动驾驶入门到进阶的路线图这里都有! 更多商务合作和技术/产品分享请联系小助理VX:AIDriver002
打开封面
下载高清视频
观看高清视频
视频下载器
大模型时代下的端到端自动驾驶(上篇)
UC伯克利最新!S3Gaussian:全球首个开源的自动驾驶场景3D GS工作
【CVPR 2024】SIN-SLAM:基于神经隐式表征的稠密语义SLAM
【地平线×自动驾驶之心】ICCV 2023最新中稿的端到端自动驾驶框架—VAD!
自动驾驶中的多传感器融合都有哪些方法?基本流程都是什么?
一文尽览:自动驾驶大语言模型应用综述分享
逆天了!NeLF-Pro | 一个方法解决多种规模场景的快速渲染重建(CVPR'24)
端到端算法有哪些优势?完爆传统感知规控?
吹爆!这可能是2024最新的Python教程,公认最适合新手入门python编程语言,全程干货无废话!比看动画片还爽!
牛津大学IROS2023最新!激光雷达相机外参标定新算法(大幅降低误差)
最新!如何使用深度强化学习在未知环境中进行导航?
【地平线×自动驾驶之心】在线高精矢量化地图构建SOTA方案MapTR v1/v2、LaneGAP
LeTS-Drive:自动驾驶中不确定场景下的实时路径规划算法
自动驾驶中的多传感器融合状态估计如何建模?
几可乱真!面向真实场景的世界模型居然被用得这么六!
什么是端到端自动驾驶?什么是基础world model?
【CVPR 2024 】ViDAR视觉点云预测赋能大规模端到端自动驾驶
计算效率提升20% | 直接LiDAR-惯性里程计:具有连续时间运动校正的轻量级LiDAR-惯性里程计
自动驾驶多传感器数据融合(2):IMU和GPS的融合定位
2022最新!基于激光雷达的3D目标检测综述(超全数据集和SOTA方法汇总)
【kaggle有救了】2024年最全kaggle新人比赛项目实战教程,资深大佬手把手教你用python在kaggle摘金牌---强到离谱!/人工智能/科技
TPVFormer:特斯拉occupany network的学术替代方案!清华大学工作
内卷时代如何降低自动驾驶数据的标注成本?双域主动学习可能是答案!
冠军!英伟达荣获CVPR端到端自动驾驶挑战赛第一名
端到端趋势下,传统规控还有未来么?
又快又准!一种基于图像表示的快速精确的LiDAR地面分割算法
从0到1!彻底搞懂BEVFormer算法原理
规划控制都有哪些模块?PNC今年的香饽饽!近10种规控算法与代码实现你都知道吗?
轨迹预测真正重要的什么?又或者说实际落地的难点在哪里?
500公里超大型SLAM数据集!多视觉异步SLAM系统(ICRA 2021)
香港大学最新!ROG-map:高效的以机器人为中心的占用网格地图
上交&诺亚最新 | 大幅提升!OccGen:面向自动驾驶的生成式多模态3D占用预测
牛津机器人研究所分享最新SLAM算法及其前沿设备
冠军分享!QCNeXt:面向下一代多智能体联合轨迹预测新框架(CVPRW2023)
视觉3D检测如何做自动标注?
太亮眼!CVPR 2024 自动驾驶方向中稿论文POSTER大全!
地平线最新SOTA!Sparse4D:迈向长时序稀疏化3D目标检测的新实践
清华大学最新!GaussianFormer:Gaussians进军视觉Occupancy任务!
CVPR 2023 | BEVHeight:基于视觉的道路3D目标检测的鲁棒框架
【IROS 2022】SOTA!基于粒子滤波的机器人定位和建图(浙大)