V
主页
USC 四足机器人研究 —— 通过 RL 增强 MPC 学习敏捷运动和敏捷行为
发布人
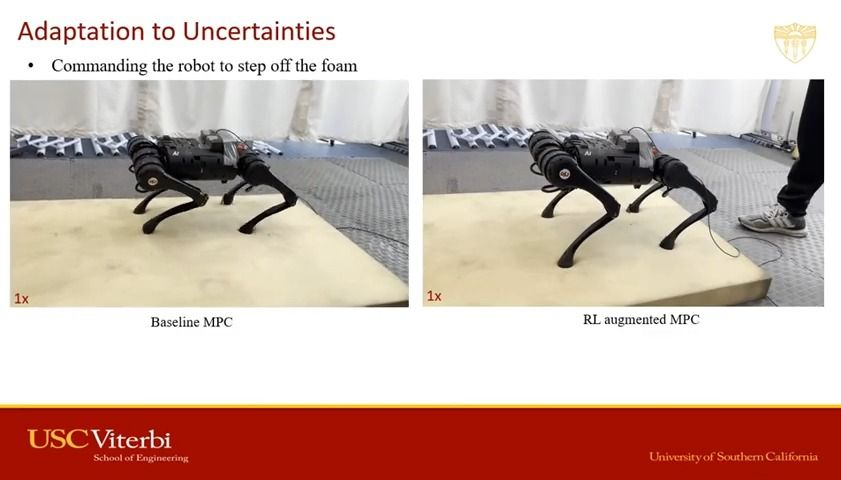
就有脚机器人而言,自适应行为包括自适应平衡和自适应摆脚反射。自适应平衡可抵消对机器人的扰动,而自适应摆动脚反射则可帮助机器人在复杂地形中穿行,而不会夹脚。在本文中,我们通过结合 RL 和 MPC,设法将自适应行为的这两个方面引入四足运动,同时提高盲腿运动的鲁棒性和敏捷性。这种结合充分利用了 MPC 在预测能力方面的优势和 RL 在汲取以往经验方面的长处。 与将站立脚控制和摆动脚轨迹分开的传统运动控制不同,我们的创新方法将它们统一起来,解决了它们缺乏同步性的问题。我们的核心贡献是将站立脚控制与摆动脚反射结合起来,通过自适应行为提高运动的敏捷性和稳健性。我们方法的一个特点是通过摆动脚反射实现稳健的盲目爬楼梯。此外,我们有意将学习模块设计成适用于不同机器人平台的通用插件。我们对策略进行了训练,并在 Unitree A1 机器人上实施了我们的方法,取得了令人印象深刻的成果:峰值转弯速率为 8.5 rad/s,峰值运行速度为 3 m/s,转向速度为 2.5 m/s。值得注意的是,该框架还允许机器人在承受 10 千克(占其身体质量的 83%)的意外负载时保持稳定运动。我们还进一步证明了同一策略的通用性和鲁棒性,它实现了不同机器人平台(如Go1和AlienGo机器人)的负载零转移。代码可在 https://github.com/DRCL-USC/RL_augmen 网站上供研究人员使用... 论文链接:https://arxiv.org/abs/2310.09442
打开封面
下载高清视频
观看高清视频
视频下载器
ETH + Oxford 四足机器人研究 —— 野外视觉导航的快速可穿越性估计
ETHZ 研究 —— 四足机器人深度柔顺运动控制
ETH + NVIDIA 研究 —— Orbit: 交互式机器人学习环境的统一仿真框架
ETHZ 四足机器人研究 —— 学习具有风险意识的运动(ICRA 2024)
ETHZ 研究:RL + 基于模型的控制: 利用按需最优控制学习灵活四足运动
ETHZ 四足机器人研究 —— 利用 3D 表征 学习在狭窄空间行走
EPFL 四足机器人研究 —— ManyQuadrupeds: 多种类四足机器人学习运动策略(ICRA 2024)
EPFL 机器人研究 —— 视觉CPG-RL: 学习视觉引导的四足机器人运动CPG(ICRA 2024)
RoMI Lab 研究 —— 通过全身 MPC 和最优区域选择实现感知运动
USC 四足机器人研究 —— 基于分层优化的全身控制(机械臂搬运重物)
SkiROS2 - 基于技能操作的 ROS 机器人控制平台
【开源】宇树Unitree Go2四足机器人/机器狗Isaac Sim/Isaac Lab ROS2仿真平台
斯坦福开源 - 机器人技能学习 通用接口UMI - 机械夹爪 3D 打印教程
迪士尼研究 —— 鲁棒神经运动控制器的轨迹增强
CoRL 机器人讲座 —— 通向通用机器人之路
控制频率对基于深度 RL 的双足机器人运动扭矩控制器的影响
西北大学机器人讲座 —— 机器人学习的控制原理
仿真人形机器人
鸟类和变形翼无人机的灵活栖息动作 | 2024 洛桑联邦理工大学
开源控制器Baselinewalkingcontroller:双足机器人平地动态行走
实时最优控制讲座 —— 改变接触条件下的轨迹优化
Svan M2: 用于机器人和人工智能研究的四足研究平台
斯坦福大学 Khatib 讲座 —— 深海机器人探索
家庭陪伴机器人量产…
ICRA 2024 全部论文及下载方式
利用封闭式平行运动链实现仿人机器人的全身控制
实时最优控制讲座 —— 从航空航天的角度
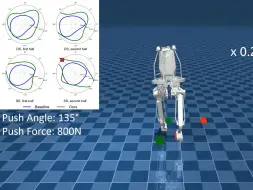
[搬] 稳健的类人机器人行走-通过强化学习增强基于模型的控制
ETH 讲座 —— 机器人的感知和学习:ML 最佳实践项目
IROS 2023 讲座 —— 从基于模型的全身控制到利用 ML 进行足式人形机器人操作
MIT 欠驱动机器人学 2024 第 9 讲 Computing Lyapunov Functions II
波士顿动力 Predictably Spot-On Industrial Inspection Boston Dynamics
2024 斯坦福 凸优化教程 Stephen Boyd 第 6 讲
CMU 最优控制 2024 助教补充 第 2 讲 牛顿法和受约束优化
用于控制、推理和学习的随机扩散
强化学习魅力时刻
TU & IIT & DLR 机器人研究 —— 在多接触场景下使用 3D DCM 实现人形机器人的敏捷动态起立控制
重磅波士顿动力人形机器人Atlas全面进化。从硬件到软件,全面放弃原有的技术路线。接入ML视觉模型后,性能更加强大。
不愧是李宏毅老师讲的【强化学习】简直太详细了!全程干货,通俗易懂,看完就跑通!(人工智能|机器学习|深度学习|强化学习)
身材高挑的人形机器人,拥有32个自由度,可以做俯卧撑