V
主页
京东 11.11 红包
ORB-SLAM3- TUM-VI Stereo-Inertial, Corridor1+Corridor2+Corridor3+Corridor4+Corri
发布人
https://www.youtube.com/channel/UCXVt-kXG6T95Z4tVaYlU80Q 论文地址:https://arxiv.org/pdf/2007.11898.pdf github:https://github.com/UZ-SLAMLab/ORB_SLAM3
打开封面
下载高清视频
观看高清视频
视频下载器
ORB-SLAM3- TUM-VI Monocular-Inertial, Outdoors6
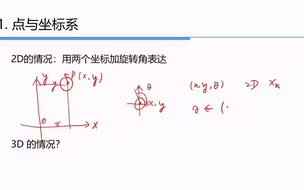
2-1 点与坐标系
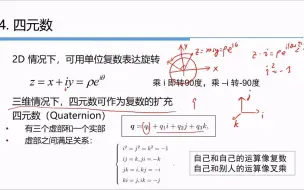
2-4 四元数
GS-LIVOM (Environment Guideline)
概率机器人
为什么需要多传感器融合
ROS控制 | 第一轮控制功能包讲解
【开源教程】ROS基础例程详解
木吒-视觉里程计和SLAM
ChainSLAM实时建图演示
【ICRA2021】Kimera-Multi:分布式多机器人度量语义SLAM系统
【ICRA2021】视觉惯性里程计的等变滤波器
1-3 视觉SLAM的数学描述
第20讲:三维激光雷达SLAM仿真
【ICRA2020】用于模拟ARVA传感器的ROS Gazebo插件
2018至2024所有超级机器人合集(含扳机社 EVA 魔神Z) 24作品
无人驾驶CAN通信快速入门:部署、测试,全过程精细讲解(主讲录制人:严正清;技术小组:小组:陈云、贾岚博、刘志强、张连会)
【开源无人机】零基础首飞一架开源无人机
LDV激光测振与3D视觉传感在智能机器人中的应用
玩hifi 就不要再去买那些山寨老鼠货了!
有缘人见(下)
2-2 旋转矩阵
【ICRA2020】基于分层四叉树特征光流跟踪的稀疏位姿图视觉惯性SLAM
【一更到底】最近我家的机器人有些奇怪,诊断书说他进入了思春期,我猜他喜欢上了我的邻居。正逢我的男友苏醒,我也刚好不需要他这个替身了。
【开源教程】ROS无人船避障代码讲解
DIY杂耍机器人,很高兴终于实现了
【ICRA2021】移动机器人 3D 三角形网格上的连续最短路径矢量场导航
visual odometry revisited
第23讲:Move_base二维自主导航规划
图灵奖得主Yann LeCun 表示,人工智能将超越人类智能,但这将是渐进式的进化,而不是一夜之间出现的超级智能
Robots Learning through Interactions
十年了!winbox终于支持原生MacOS啦!一起来看4.0有哪些变化
高翔-大规模点云地图的自动化构建
ESXi虚拟机All In One搭建ROS主路由+旁路由、NAS(OMV)、Win11英文视频教程 超迷R1 Miniroute米如特
压缩感知和消息传递
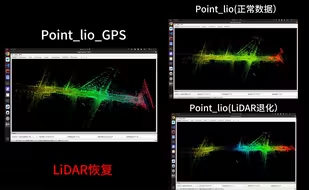
Point_lio_gps解决LiDAR退化导致的里程计漂移。
【ICRA2021】3732-RigidFusion:大型动态刚体环境中的机器人SLAM
【ICRA2021】单目直接视觉里程计中基于特征的重定位的紧密集成
FI-SLAM: Feature Information-Based Robust and Efficient Vision-Inertial-Aided Li
SLAM算法三小时即可入门!计算机大佬十节课精讲让你从零到一快速掌握SLAM理论及无人驾驶实战!