V
主页
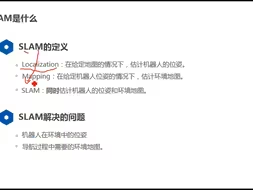
2-4 四元数
发布人
打开封面
下载高清视频
观看高清视频
视频下载器
2-2 旋转矩阵
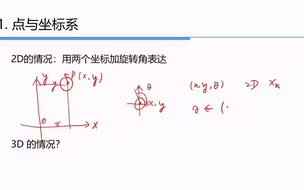
2-1 点与坐标系
港大ArcLab重磅开源LVI-GS:3DGS紧耦合LiDAR-视觉-惯性SLAM!实时照片级建图!
【ICRA2021】VOLDOR+SLAM:当基于功能或直接的方法还不够好的时候
GPS+IMU+3D激光建图
fastlio建图与自主导航演示
浙大章国锋团队最新NIS-SLAM:突破神经隐式语义RGB-D SLAM的极限(上篇)
2-5 实战环节
3D建图小能手
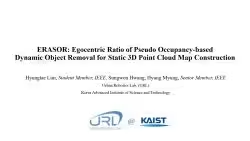
【ICRA2021】3508-ERASOR:一种基于栅格占据情况之差异的动态物体过滤方法
谁说跑VSLAM就得小心翼翼?我们的VIO鲁棒性爆表,放心用,还有200 Hz的高帧率定位输出
使用 Isaac Sim 和 Isaac ROS 实现 AMR 视觉导航
使用Isaac对Orin NX进行硬件在环测试(视觉SLAM)
3-1 群
《ROS 2机器人开发从入门到实践》7.2.1构建第一章导航地图
《ROS 2机器人开发从入门到实践》7.3.1Navigation2介绍与安装
有缘人见(上)
【ICRA2021】单目直接视觉里程计中基于特征的重定位的紧密集成
NeurlPS'24开源 | 迈向SLAM/SfM回环新纪元!MSG:关联场景中共视的地点和目标!
【ICRA2021】3732-RigidFusion:大型动态刚体环境中的机器人SLAM
基于Gazebo的无人车激光SLAM建图与导航仿真
【ICRA2021】动能缓冲器避障
【浙大谭平】从相机标定到视觉SLAM
7.2无人机PID参数调试
有缘人见
自由穿梭”小黑屋“SLAM挑战
多摄像头多地图视觉惯性定位系统 (VILO):实时精准定位方案
端到端机械臂视觉抓取无人配送的场景演示
3738-来自两个UAV的分布式可变基线双目SLAM
ORB-SLAM3- TUM-VI Stereo-Inertial, room1+outdoors1+outdoors8
《ROS 2机器人开发从入门到实践》7.3.2编写launch并启动导航
【ICRA2021】HyperMap:单目相机注册的压缩3D地图
要啥激光雷达,Factor Perception SDK夜间纯视觉SLAM演示
基于NVIDIA Isaac Sim和LIO-SAM的激光SLAM demo
【开源无人车】从零调试一辆PIX无人车
要啥激光雷达,2D、2.5D、3D地图我全都有,Factor Perception SDK纯视觉SLAM地图数据展示
【ICRA2021】自动驾驶和地图学习的定制地标表示的自动建图
[IEEE TCSVT 2024]语义无关的动态SLAM
【ICRA2020】紧耦合单锚超宽带辅助单目视觉里程计
学长说:有佬的帮助就是不一样!!!