V
主页
京东 11.11 红包
ORB-SLAM3- TUM-VI Monocular-Inertial, Outdoors6
发布人
https://www.youtube.com/channel/UCXVt-kXG6T95Z4tVaYlU80Q 论文地址:https://arxiv.org/pdf/2007.11898.pdf github:https://github.com/UZ-SLAMLab/ORB_SLAM3
打开封面
下载高清视频
观看高清视频
视频下载器
ORB-SLAM3- TUM-VI Monocular-Inertial, room1+slides1+slides2+slides3
ORB-SLAM3- TUM-VI Stereo-Inertial, Corridor1+Corridor2+Corridor3+Corridor4+Corri
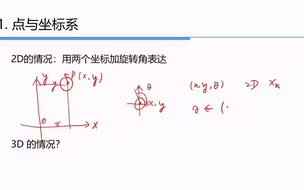
2-1 点与坐标系
【ICRA2021】3475-OV2SLAM:用于实时应用的完全在线和通用的视觉SLAM
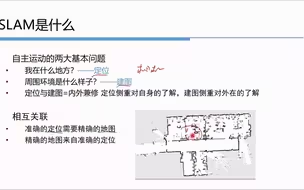
1-2 SLAM是什么
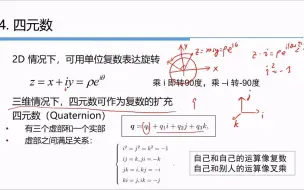
2-4 四元数
1-4 Linux下的C++基础
【ICRA2021】3505-MOLTR:单目RGB视频的多目标定位、跟踪和重建
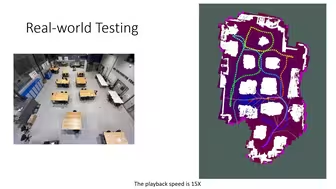
【ICRA2021】3508-ERASOR:一种基于栅格占据情况之差异的动态物体过滤方法
【ICRA2021】强度SLAM:大规模环境的强度辅助定位和建图
Moveit!
【ICRA2021】3647-使用相对深度先验的偏振单目稠密建图
GS-LIVOM (Environment Guideline)
文伟松 - 3D LiDAR Aided GNSS Positioning in Urban Canyons
【ICRA2021】MaAST:使用语义转换器进行地图注意力以实现高效的视觉导航
【ICRA2021】固态激光雷达的轻型三维定位和建图
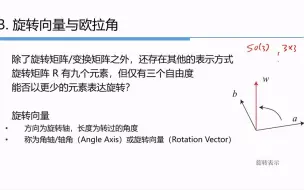
2-3 旋转向量和欧拉角
【ICRA2021】自动驾驶汽车的轻量级语义网格建图
1-1课程内容与预备知识
visual odometry revisited
机器人自助定位导航之路的探索
【ICRA2021】用于自动驾驶汽车的基于 SRIF 的鲁棒 LiDAR-IMU 定位
2-2 旋转矩阵
“北斗导航与多源增强”学术沙龙(北斗导航篇)
3-1 群
【ICRA2021】用于机器人应用的 LiDAR 里程计的自监督学习
【ICRA2021】用于在不确定性下自主探索建图的零样本强化学习
【ICRA2021】TT-SLAM:用于平面环境的密集单目 SLAM
【ICRA2021】HyperMap:单目相机注册的压缩3D地图
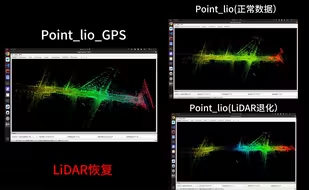
Point_lio_gps解决LiDAR退化导致的里程计漂移。
【ICRA2021】3731-用于大规模勘探任务的弹性高效激光雷达重建
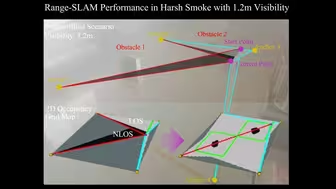
【UWB 抗烟尘SLAM】Range-SLAM: Ultra-Wideband-Based Smoke-Resistant Real-Time Localiza
LARVIO在数据集上的表现
【ICRA2021】机器人导航的主动模块化环境
【ICRA2021】3672-基于多分辨率边界的自主三维勘探规划器
铰接式车辆的运动规划
【ICRA2021】UVIP:用于复杂室内环境的强大的 UWB 辅助视觉惯性定位系统
概率机器人
【ICRA2021】3518-在不利环境条件下使用轻型、低成本毫米波雷达导航的表示的跨模态对比学习
【ICRA2021】Kimera-Multi:分布式多机器人度量语义SLAM系统