V
主页
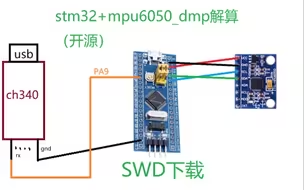
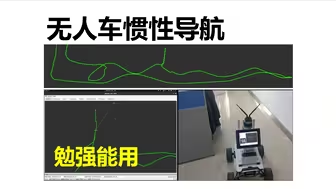
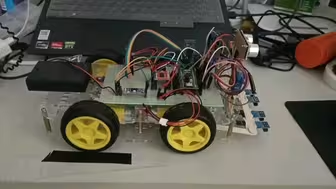
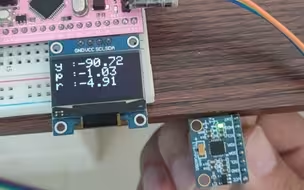
2024年电赛H题使用mpu6050计算偏航角实现惯导的方法(代码讲解)
发布人
为上一个视频开源的库做讲解啦,新人up讲解不好轻喷 github链接:https://github.com/yhy-lk/myMPU6050 效果演示: https://www.bilibili.com/video/BV1ZBvweEE6S/?spm_id_from=333.337.search-card.all.click&vd_source=4f296841ea6b433f1b35b1d40226e77d
打开封面
下载高清视频
观看高清视频
视频下载器
IMU 原理简介
mpu6050_dmp姿态解算,开源,stm32欧拉角解算,代码在视频说明里,欢迎白嫖
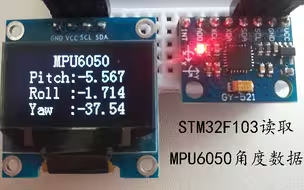
STM32读取MPU6050角度数据
STM32读取MPU9250姿态数据
写惯导的第一周,想似
stm32使用IIC读取MPU6050的数据
mpu6050dmp偏航角无漂移体感控制
STM32读取MPU6050姿态数据设计
MPU6050陀螺仪加速度模块完整教程✔ 两个案例演示✔ ✔
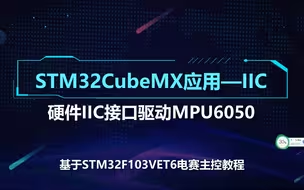
09_MPU6050,电赛主控,MPU6050驱动函数编写,STM32CubeMX配置I2C
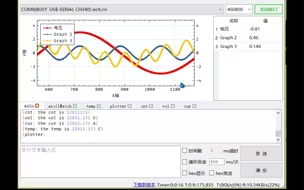
纸飞机串口助手show
陀螺仪加速度计MPU6050模块应用!加上卡尔曼滤波果然就不一样。
mpu6050,从研究到放弃
mpu6050三种常见滤波方法的对比|卡尔曼滤波、一阶互补滤波、四元数法
【求助】MPU6050使用DMP库yaw角不准
如何处理电子陀螺仪MPU6050的零点漂移问题
电赛H题 看着简单做着难
IMU进行惯性导航
MPU6050用法-角度闭环-STM32-17.2-借助MPU6050 PID闭环朝指定方向运动和旋转指定角度
智能小车 - 巡线小车教程 (红外巡迹原理,脉轮,STM32)
CH32读取MPU6050姿态数据(卡尔曼滤波法)
[铁头山羊stm32入门教程] 6.4. MPU6050(下)
获取姿态角MPU6050
2023电赛H题方案开源
提前剧透!2024保姆级电赛攻略指南,掌握核心要点,让你快人一步!
自动行驶小车(H题)硬件讲解 2024年
2024年电赛H题,声光提示停4轮车。mspm0g3507芯片主控2024ti杯。等待完赛准备开源。
使用STM32F103在keil软件下编程解算欧拉角(代码讲解)
2023年全国电赛-满分电赛报告书写
24电赛H题 普通35的陀螺仪拿捏了
使用MPU6050+卡尔曼滤波+pid使小车走直线,几乎无漂移
【2024电赛】TI MSPM0快速入门课 - 开发环境部署
陀螺仪丝滑转向环,可任意角度旋转
智能小车制作教程(基于stm32)
【Arduino】MPU6050 测欧拉角 带卡尔曼滤波 自动修正yaw角(附代码)
使用STM32F103在keil软件下编程解算欧拉角(问题解答)
【51模块库】MPU6050六轴陀螺仪 驱动代码+使用范例
浙工大独轮狂飙队 48.405拿下国赛第六 前五佬的惯导真的好帅 不过十分钟真的太短了,感觉大家都没发挥出自己的实力
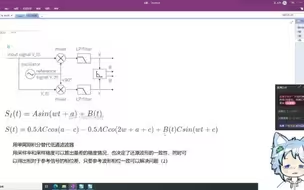
mpu6050滤波,非dmp库解算,解算出来非常稳定的yaw,没有漂移,没有静态累计误差,可移植M0端mcu
stm32 DMP库姿态解算