V
主页
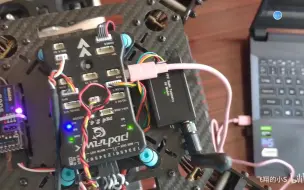
VID_20200709_114756,b为默认的5.5,第一次飞ACfly
发布人
b为默认的5.5,第一次飞ACfly
打开封面
下载高清视频
观看高清视频
视频下载器
确认了整个系统的坐标系是OK的,在T265默认朝北上电的情况下,确认传入传感器更新函数的数据符合ACfly的东北天坐标系VID_20201029_162226
基于opencv实现先飞吊舱的KCF框选跟踪 20231110
基于D435i跑RTABMAP 20230721_111623截取视频
ubuntu18.04-win10双系统修改开启启动顺序(修改为默认选win10启动)VID_20201111_002250
euroc数据集跑高翔的ORB-YGZ-SLAM 不基于ROS 20240811_162252
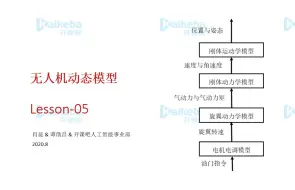
智能无人机课程 7 常用传感器
2021弄T265与GPS融合 VID_20210829_100242
双目imu MSCKF 无人机定点飞行测试 20230814
智能无人机课程 13 PX4仿真平台搭建
智能无人机课程 2 四旋翼无人机的组成和拼装 上
智能无人机课程 5 姿态表示与控制理论
智能无人机课程 6 飞行控制器
智能无人机课程 11 linux git python
小车跑vinsgpu-ego VID_20221010_143409 截取视频
GQC上PX4校准步骤演示(转载)20201117_201859
智能无人机课程 12 ros gazebo
智能无人机课程 3 四旋翼无人机的组成和拼装 下
基于D435i跑vins+DenseSurfelMapping注意点说明与操作演示20240328_202507
智能无人机课程 16 运动规划
基于官方data.bag包跑voxblox建图 基于位姿与点云构建ESDF地图 20240315_144153
智能无人机课程 17 机器学习和图像处理
智能无人机课程 14 多机协同控制
双目imu SVO2.0 无人机定点飞行测试 20230720
CRAIC2023无人协同赛项第一名大连理工的视频
无人机cartographer+move_base VID_20220522_184019
发期望姿态+推力实现无人机悬停和走轨迹 VID_20220327_173714
用D435i跑PL-VINS屏幕录像 2022-03-05 22-19-01 截取视频
智能无人机课程 9 试飞无人机
用fiesta基于位姿和深度图构建ESDF地图操作演示 20240317_091326
智能无人机课程 8 状态估计
把基于opencv4的vins-mono前端改为superpoint+光流 20230918_160125 截取视频
疑似大疆无人机新品泄露
基于kalibr docker的D435i双目标定和双目IMU联合标定操作演示录屏20220416_125342
把ego的plan_env模块单独取出订阅位姿和深度图构建自己可用的导航地图 20240315_091408 截取视频 截取合并
智能无人机课程 18 目标检测和跟踪
观看FASTLAB的一次飞行,挺稳的 20221027
OrinNX上部署运行ROS2版本的vinsfusiongpu 20240429_145424
三阶倒立摆(转载)20201114_223723
一次给他人的双光云台ROS串口驱动讲解 20210607_202821
官方bag包跑FAST-LIVO 20240716_201531