V
主页
京东 11.11 红包
【三维重建】InstantSplat:稀疏视角重建三维场景(无需SFM位姿)
发布人
InstantSplat,旨在在几秒钟内从稀疏视图,未设置的图像重建场景。我们的方法利用多视点立体(MVS)的能力,粗场景初始化,并提出了一个基于梯度的高斯属性和相机参数的联合优化,以自监督的方式。与以前性能最好的无姿态方法[5,10]相比,我们将所需的视图数量从数百个[5,10]减少到几个,从而使大规模3D建模仅具有最少数量的图像和无姿态视图
打开封面
下载高清视频
观看高清视频
视频下载器
【稀疏三维重建】pixelSplats:只需两张图的可扩展三维重建
【三维重建】近期进展:从UC-GS、实时高斯到Splatt3R、Spann3R(上)
【稀疏三维重建】Flash3D:单张图像重建场景的GaussianSplitting
【三维重建】动态场景和高质量表面的Gaussian Splatting
【动态场景重建】《deformable 3D Gaussian Splatting》与《4D Gaussian Splatting》原理讲解(CVPR2024)
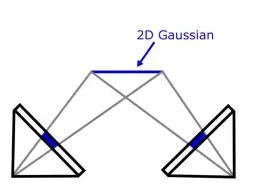
【三维重建】2DGS:2D Gaussian Splatting的几何辐射场
【三维重建】大场景的分层3D GS重建
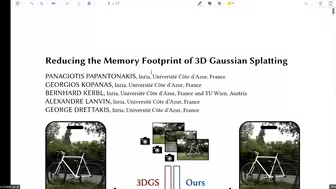
【三维重建】Reducing the Memory Footprint of 3D Gaussian Splatting(3D GS的加速与优化)
Text-to-3D、Image-to-3D等三维生成方法(EG3D、DiffRFL、ZeroRF、SSDNeRF等原理解读)
【三维重建】china3dv大会-大规模动态场景的重建与渲染
【三维重建】pixelGS:像素控制密度的3DGS高斯喷溅
【三维重建】Gaussian Splatting在线聚会(《森林管理应用》,以及xgrids公司的《3D高斯解决方案及其跨行业应用》)
【三维AIGC】GSD:从单张视图中重建3DGS的扩散模型
【三维重建】Sparse_NeRF:只需三张图就能重建三维场景(代码讲解)
【NeRF】【自监督学习】NeRF-MAE:NerfStudio组联合TOYOTA推出的三维自监督预训练大模型
全网讲解最全面!一百集从零到一教学【3D点云】+【三维重建】入门及实战,自动驾驶风口掌握这一算法绝对保值!
【三维重建汇总】NeRF和GS重建中,如何排除干扰物?(RobustNeRF、PixelGS等论文汇总)
【三维重建】DRAGON: Drone and Ground GaussianSplatting for 3D Building Reconstruction
【三维重建】变分贝叶斯的Gaussian Splatting(文献解读)
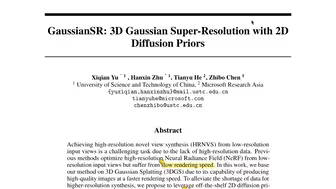
【三维重建】GaussianSR-2D扩散先验的三维高斯超分
【法线估计】StableNormal:基于扩散模型的由粗到细的法线估计方法
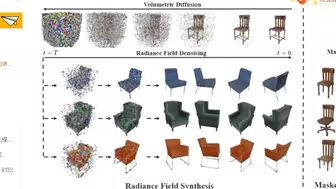
NeurlPS'24开源 | GaussianCube 一种用于三维生成建模的结构化和 显式辐射表示,引领三维重建新范式
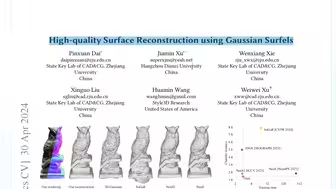
【三维重建】使用高斯表面元( Surfels) 高质量重建表面
【3D点云+三维重建】最好出论文的研究方向,博导带你从零解读两大方向的核心算法PointNet与NeuralRecon!赶紧收藏
【三维场景展示】1原始森林(UE+NeRF/GS技术)
【三维重建】Robust 3D GS:对模糊性进行建模的三维高斯重建方法(未变声版)
VastGaussian:用于大场景重建的大3D Gaussian(CVPR 2024)论文解读
双目摄像头三维重建
【三维重建】Robust 3D GS:对模糊性进行建模的三维高斯重建方法
【三维重建】ExtraNeRF:基于扩散模型,对NeRF进行外延
【三维AIGC】扩散模型LDM辅助3D Gaussian重建三维场景
【三维编辑】Gaussian Grouping与GaussianEditor:基于GS的三维编辑与修复(原理讲解)
终于有人把三维点云与三维重建讲得如此简单了!算法解读、项目实战、论文解读、环境配置
【三维场景展示】2大佛峡谷(UE+NeRF/GS技术)
这也太全了!迪哥手把手带你入门【3D点云+三维重建】实战,从原理解析到项目实战 -NeuralRecon/PointNet
【三维重建】photoslam:一种基于超源语的高保真SLAM框架
【SLAM】LoopSplats:通过直接的3DGS注册,实现密集建图和在线回环检测的全局一致性图优化
【2024已完结】这可能是B站目前唯一能将【3D点云+三维重建】讲清楚的教程了,原理解读+实战分析,迪哥一次性全讲明白!—人工智能/神经网络/深度学习
【三维场景展示】3室内博物馆(UE+NeRF/GS技术)
[3DGS+RT] Google提出EVER,可替代 3DGS的方法,可对恒定密度椭球进行光线追踪,比 3DGS 的图像质量和灵活性更高,同时保持实时速度