V
主页
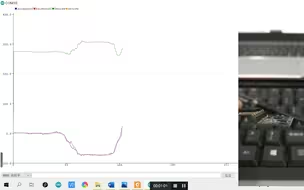
mpu6050互补滤波效果还可以
发布人
-
打开封面
下载高清视频
观看高清视频
视频下载器
mpu6050滤波,非dmp库解算,解算出来非常稳定的yaw,没有漂移,没有静态累计误差,可移植M0端mcu
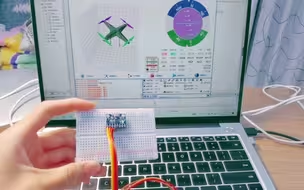
mpu6050手姿检测,二维云台同步控制
mpu6050平衡模型
mpu6050三种常见滤波方法的对比|卡尔曼滤波、一阶互补滤波、四元数法
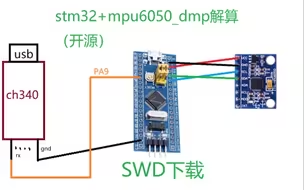
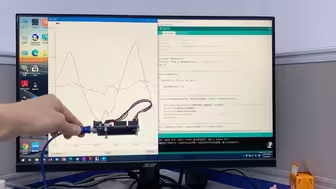
mpu6050_dmp姿态解算,开源,stm32欧拉角解算,代码在视频说明里,欢迎白嫖
研究了一个月的卡尔曼滤波和四元数,今天手动解算姿态角成功。对比一下手动解算和DMP解算。
MPU6050陀螺仪加速度模块完整教程✔ 两个案例演示✔ ✔
stm32 iic mpu6050 控制二维舵机跟随
MPU6050+DMP获取姿态解析
陀螺仪加速度计MPU6050模块应用!加上卡尔曼滤波果然就不一样。
5分钟玩转(mpu6050/陀螺仪/GY-521)角度传感器篇,附源码
MPU6050(DMP)简单读一下数据
卡尔曼Kalman滤波实例讲解:MPU6050加速度计陀螺仪数据解算与融合滤波,附代码
STM32读取MPU6050角度数据
机械臂+mpu6050,晚上花了半个小时,小小优化了一点点。
基于STM32F103的MPU6050姿态跟随舵机云台
横列式矢量双旋翼调试PID及飞行实录
二级倒立摆
使用MPU6050+卡尔曼滤波+pid使小车走直线,几乎无漂移
如何处理电子陀螺仪MPU6050的零点漂移问题
嵌入式比赛主从交互
学习心得|基于卡尔曼滤波的MPU6050姿态解算
调了半个月pid滤波,总算不抖了
无人机pid调参
【软核】卡尔曼滤波,不废话
平衡小车遇瓶颈,调速度环不管怎么调都无法长时间平衡,求大神指点
lvgl测试,STM32F103也太卡啦吧
QFPN封装的F103
小技巧解决拍摄的屏幕条纹 - stm32_arduboy_V1.0游戏机
CH32读取MPU6050姿态数据(卡尔曼滤波法)
[小学生都会的]MPU6050DMP库移植(stm32标准库)
【开源】自制成本贼低的N轴机械臂!
浮点数串口通信_上位机设计_示波器_Matlab_App_Design
为了连接再简便一点,真是绞尽脑汁。
从零做飞控(4)IMU加速度计和陀螺仪的互补滤波
复刻失败直接转行
形象理解四元数
[开源]从零手搓快速傅里叶变换(FFT)蝶形算法,高中生都听得懂
MPU6050漂移校准解决方案 用Python快速秒杀
ESP32智能水杯研发遇到阻碍,请求正点原子研发补充测电容demo的过程