V
主页
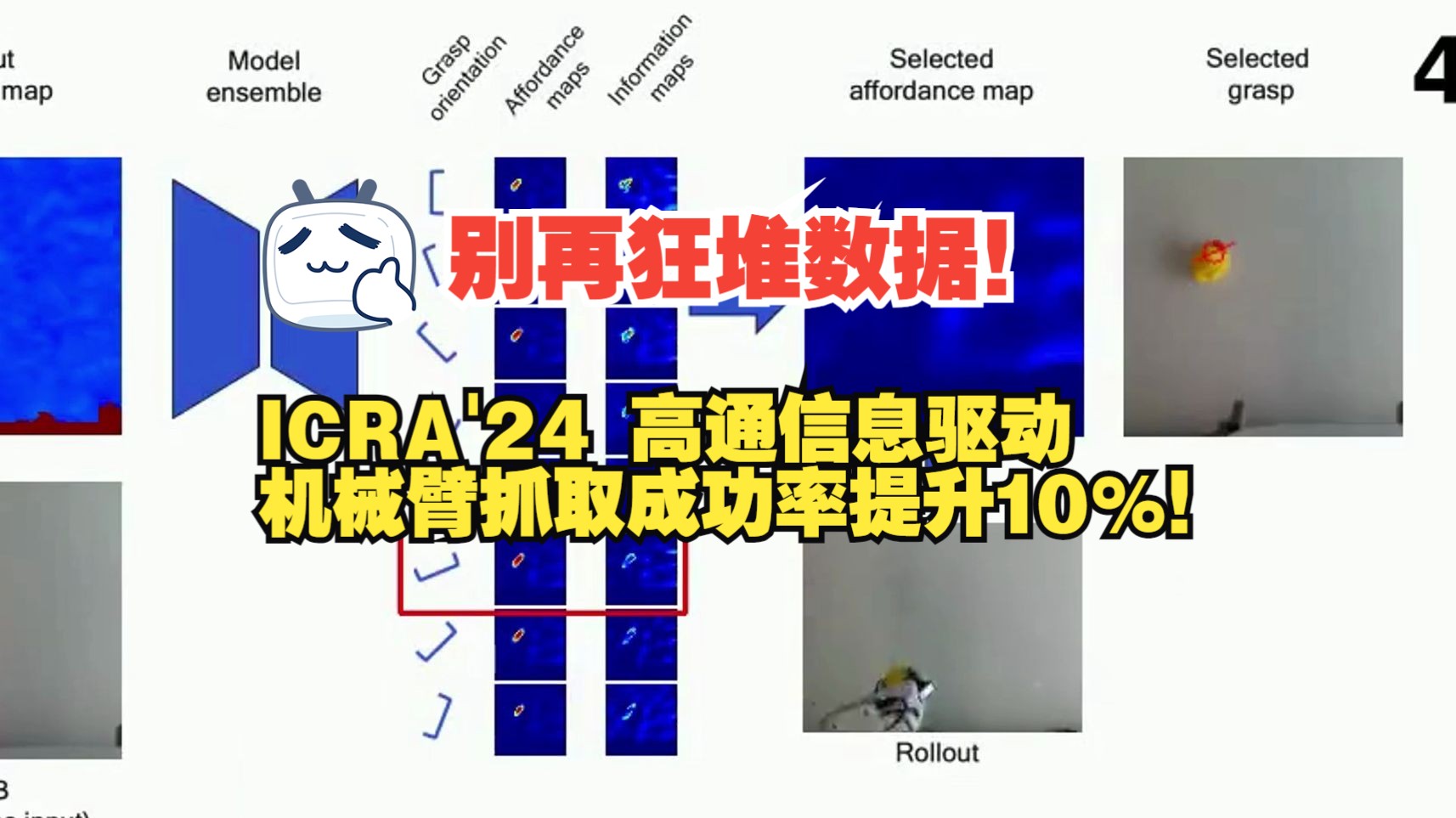
别再狂堆数据!ICRA'24 高通信息驱动机械臂抓取成功率提升10%!
发布人
别再狂堆数据!ICRA'24 高通信息驱动机械臂抓取成功率提升10%!#计算机 #人工智能 #计算机视觉 #算法 #科技 #人工智能算法 #机械臂抓取 在微信公众号「3DCV」回复:「原论文」,获取论文代码和链接,赶快学起来! 这篇文章提出了一种名为IDA的方法,旨在促进机器人操作中的可供性发现。他们将这一问题视为情境性赌博问题,并提出了一种基于上下文的方法来解决。在这个方法中,机器人观察环境的当前状态,并选择执行一个动作,该动作可能会带来奖励。他们使用信息增益准则来衡量尝试不同动作所能获得的信息量,以便更好地学习可供性模型。为了在探索和利用之间取得平衡,他们结合了信息驱动的探索策略和环境奖励的预期收益,采用了上置信界限(UCB)策略来选择动作。他们还提出了一种基于自动编码器的模型架构,用于生成环境的视觉可供性图,并采用了轻量级集合来减少计算开销。最后,他们通过实验证明了他们方法的有效性,表明它在ManiSkill2中的几项任务中表现出色,并能够快速学习在现实世界中抓取物体。
打开封面
下载高清视频
观看高清视频
视频下载器
远超所有SOTA!ETH最新4DGF结合3DGS和NeRF速度还能加速200倍!
华科大最新PointDreamer3D纹理重建,清晰如真
无需 GPS:语义地图引领多机器人室内外探索
【CVPR经典论文】港大&浙大提出Gen6D:从 RGB 图像估计 6 自由度物体姿势
2.4倍加速!PRAM最新开源的视觉定位模型!解锁以地图为中心的学习!
斯坦福大学《CS106B: Programming Abstractions 2022|CS106B:抽象编程》中英字幕
UIUC&英伟达开源NeRFDeformer转换3D场景仅需一张RGB-D快照!(CVPR'24)
3D重建革命!零预训练10倍 速度360°重建新方法 ZeroRF
CoherentGS:从稀疏的输入图像中重建高质量的3D场景
CVPR'24开源 MASA万能匹配一切、跟踪一切!
3DGS SLAM最新SOTA | 使用视觉、深度和惯性测量进行SLAM的多模态3DGS
暴力涨点,快速发论文!彻底摆脱创新点、改模型、改代码的困扰!13个论文即插即用模块帮你快速搭建模型结构,轻松搞定大小论文!
ICML'24开源 !LEO:首个三维世界中的具身通用智能体-上篇
重磅开源!连你的微表情都可以轻松还原!SMIRK超强3D面部重建技术!
CVPR'24商汤开源!3DGS再进化,可控的3D编辑!
CVPR'24开源 通过3D GS进行整体城市3D场景理解!
光学3D测量技术原理及应用
B站强推!2024公认最通俗易懂的【AI大模型】教程,24集付费课程(附资料)LLM大模型_RAG_大模型微调_多模态
如何学习NeRF/3DGS-SLAM?(公开课直播回放)
研究生水论文,深度学习还不知道怎么缝合模块?这80个即插即用模块一定不能错过!
WACV2023:基于结构光的RGB事件相机(代码开源)
三维点云系列视频——第一章绪论
CVPR 2024开源 VSRD:无需LiDAR和标注使用2D渲染解决3D检测的新范式!
相机标定的基本原理与经验分享
MIT重磅开源!别再用COLMAP了!FlowMap给你最精确的SfM!
黑市最贵和最便宜的信息,区别有多大?
零基础学编程,请疯狂用这个app!包含软件下载|环境配置|热门工具|学习路线|热门题库|项目案例等
牛津VGG团队最新开源!Flash3D:一张图像重建整个3D场景!通用性超强!
中科院最新CityGaussian:VRAR时代的城市重建新标杆
ICLR‘24 Spotlight 首个十亿级别3D通用大模型
给任何模型上色!腾讯打通三维重建最后一关:高质量纹理生成!
【2个月喜提SCI!】让你论文越写越爽!打死我也不删的科研神器!你知道几个?本科生/研究生/博士生快进来打破信息茧房!
CVPR'24最佳学生论文亚军!新赛道!SpiderMatch:3D形状匹配
图宾根大学最新提出 | 基于3D高斯的高效紧凑的三维场景表面重建技术
【相关性套利选币必看】升级后选币效果翻番,选币结果喂到嘴,非支配排序遗传算法 II (NSGA-II
CVPR'24 3D-GS再进化Scaffold-GS实时自适应视图渲染的未来
SIGGRAPH'2024|RTG-SLAM:基于3DGS的大尺度场景实时三维重建-上篇
四旋翼无人机-PX4控制算法原理
极快跟踪一切!DOT:无惧遮挡!
【一年连中6篇SCI】SCI论文发到手软!清华博士手把手带你如何高效发表一篇SCI论文?写作投稿干货经验分享