V
主页
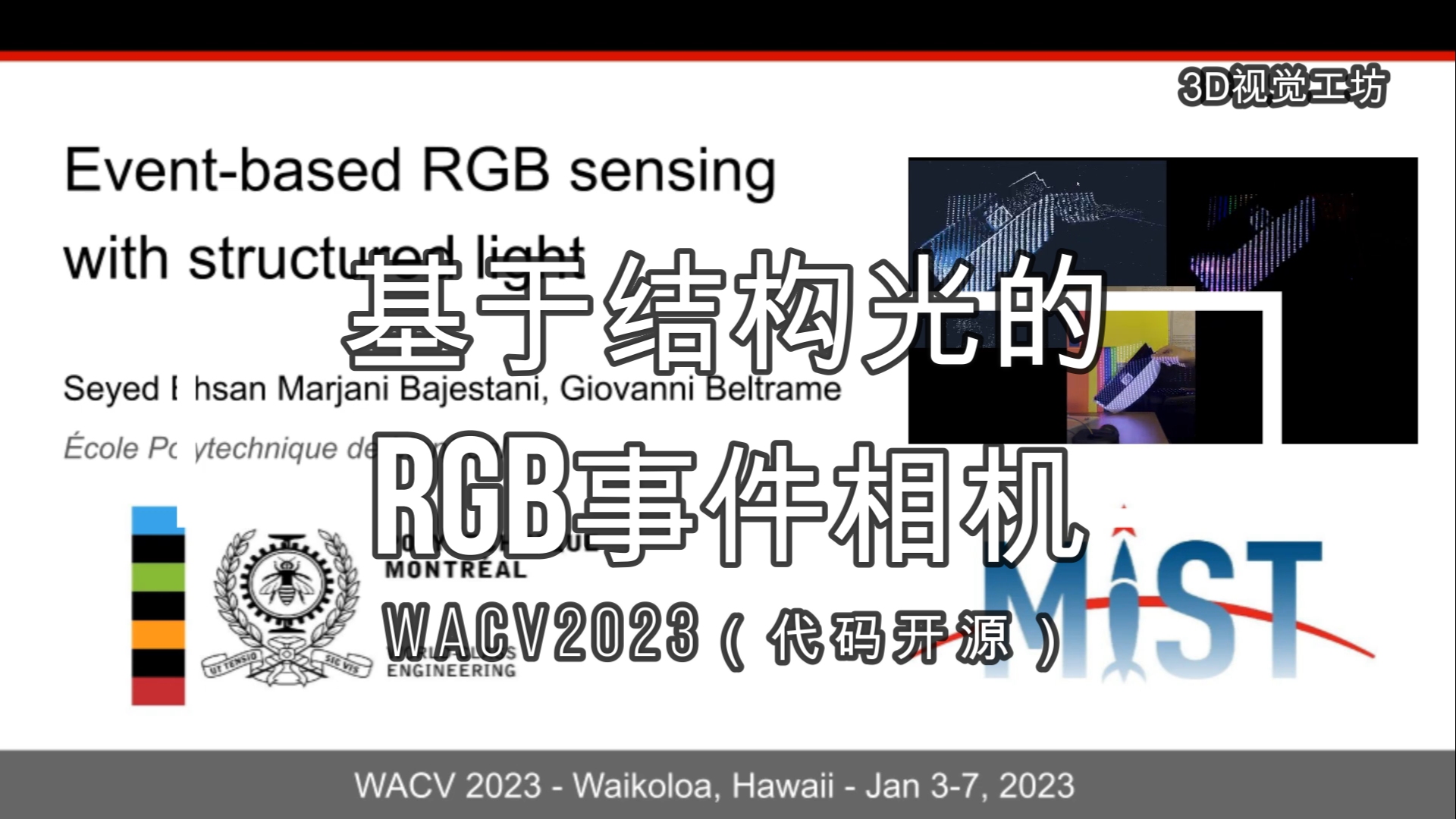
WACV2023:基于结构光的RGB事件相机(代码开源)
发布人
https://www.youtube.com/watch?v=0xlt1wXJjfQ 本文提出一种使用结构光投影仪辅助的单色 EC 来检测完整 RGB 事件的方法。投影仪在场景中发射快速变化的 RGB 光束图案,其反射由 EC 捕获。我们结合了 EC 和基于投影的技术的优点,并允许使用商业 DLP4500 投影仪和单目单色 EC 检测静态或移动物体的深度和颜色,为高速RGB-D传感应用铺平道路。具体效果请看视频!
打开封面
下载高清视频
观看高清视频
视频下载器
ECCV'24开源 | 又快又好!6DGS重新定义6D物体位姿估计!
无需额外训练!SAMPro3D:零样本3D分割一切!
牛津VGG团队最新开源!Flash3D:一张图像重建整个3D场景!通用性超强!
从零搭建一套结构光3D重建系统 [理论+源码+实践]
四旋翼模型与控制基础
ECCV'24开源 完虐COLMAP!百倍加速!ACEZero:全新SfM革新三维重建!
具身智能势不可挡GRUtopia首个城市级具身智能仿真平台“浦源·桃源”
清华搞定无人机!LVCP:雷达-视觉紧耦合协同定位!无需先验地图和初始位姿!
ICML'24开源 !LEO:首个三维世界中的具身通用智能体-上篇
ECCV'24开源 | 拳打ORB3脚踢DROID!强化学习+VO=精度暴涨19%!
CVPR2024开源NetTrack:跟踪高动态物体!
高速结构光三维面形测量方法
极快跟踪一切!DOT:无惧遮挡!
吊打ORB3!73Hz!南洋理工重磅开源AirSLAM:无惧复杂光照的超强点线视觉SLAM!
传感器与遥控器校准原理
速度提升10倍以上!Depth Anything V2更稳健、精细的单目深度估计
如何学习NeRF/3DGS-SLAM?(公开课直播回放)
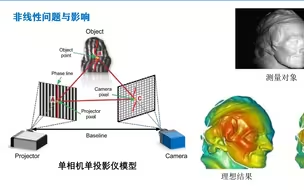
结构光的非线性问题与校正
Open3D与点云处理简介(公开课)
ECCV'24 | 更快更准!Meta最新FPV-NeRF:将NeRF完美应用FPV!
无相机姿态40秒重建3DGS方法
Occupancy Networks后处理
公开课|结构光之相移法+格雷码技术详解
ECCV'24开源 | DoubleTake深度估计& 三维重建最强解决方案!
基于面结构光的高反射物体重建方法关键技术分享[相位偏折术]
光学3D测量技术原理及应用
BMVC'24开源 | BaseBoostDepth:更强大的自监督单目深度估计
四旋翼无人机-PX4控制算法代码
四旋翼无人机-ADRC整体介绍
三维点云系列视频——第一章绪论
终于有人教我写论文了!中山大学最新论文写作教程,只需20分钟教你写出一篇研究性论文&综述!
中科院最新CityGaussian:VRAR时代的城市重建新标杆
BEV与Occupancy入门参考资料必看
无需标定板,高分辨率LiDAR和相机的像素级外部自标定,代码开源
LVI-SAM代码实战与评估
绪论|单目相机标定理论及张正友标定法(上篇)
CVPR'24开源 通过3D GS进行整体城市3D场景理解!
CVPR 2024开源 VSRD:无需LiDAR和标注使用2D渲染解决3D检测的新范式!
深度相机概述
相机标定的基本原理与经验分享