V
主页
CVPR'24最佳学生论文亚军!新赛道!SpiderMatch:3D形状匹配
发布人
CVPR'24最佳学生论文亚军!新赛道!SpiderMatch:3D形状匹配#人工智能 #科技 #算法 #计算机 #CVPR #黑科技 #编程 在微信公众号「3DCV」回复:「原论文」,获取论文代码和链接,赶快学起来! 在乘积空间上寻找最短路径是解决众多匹配问题变种的流行方法,包括用于信号匹配的动态时间规整方法、曲线匹配或曲线与3D形状的匹配。虽然这些方法允许在多项式时间内计算全局最优解,但它们在3D形状匹配上的自然推广被广泛认为是难以处理的。在这项工作中,我们通过提出一种新颖的基于路径的3D形状匹配形式化来解决这个问题。更具体地说,我们考虑了一种替代的形状离散化方法,其中一个3D形状(源形状)被表示为SpiderCurve,即一条长且自交的曲线,它追踪3D形状的表面。然后,我们将3D形状匹配问题视为在SpiderCurve和目标3D形状的乘积图中寻找最短路径。我们的方法引入了一组新颖的约束,以确保全局几何一致的匹配。总的来说,我们的形式化导致了一个整数线性规划问题,我们通过实验表明它可以有效地求解到全局最优。我们展示了我们的方法与最近的最先进的形状匹配方法相竞争,同时保证了几何一致性。@3DCV
打开封面
下载高清视频
观看高清视频
视频下载器
3DGS进化,高效高质量的GaussianPro来袭!
太稳啦!Gaussian Splatting杀入6D物体位姿估计!
NVIDIA再斩CVPR冠军方案!Hydra-MDP:突破端到端多模态自动驾驶!
70年老算法Dijkstra被证明普遍最优 斩获顶会FOCS 2024最佳论文
MIT重磅开源!别再用COLMAP了!FlowMap给你最精确的SfM!
最新!无人机动态环境感知&规划新思路!
CVPR2023开源 无纹理和重复纹理也能实现鲁棒的特征匹配!
吊打ORB3!73Hz!南洋理工重磅开源AirSLAM:无惧复杂光照的超强点线视觉SLAM!
ICRA2022:自适应环境的移动机器人自主导航
真的超容易“搞深度学习神经网络到底怎么改代码的啊?”复旦博士教我用一本书搞定!
极快跟踪一切!DOT:无惧遮挡!
CVPR'24开源 | 吊打一切VINS!又快又好的视觉惯性导航系统!
Nature正刊开源!突破低延迟自动驾驶视觉感知!
HeadCraft-超逼真头部细微特征生成!3DMM的革命!
小波变换+Transformer荣登Nature!预测误差降低36%!
3DGS进化?2DGS颠覆3D场景重建!
什么?不做时间同步也可以实现LiDAR-相机三维重建?
20+FPS!最新开源!加上回环检测的NeRF SLAM竟是如此精确!
CVPR2024开源NetTrack:跟踪高动态物体!
神经辐射场照亮动态SLAM:构建精细场景地图
顶刊论文:LineTR:用于视觉定位的上下文感知线描述符
吹爆!研究生必须知道的四款神经网络可视化神仙工具! 不管是用于理解神经网络、组会汇报与展示还是论文绘图都相当好用!#人工智能 #机器学习 #深度学习 #神经网络
ECCV'24开源 完虐COLMAP!百倍加速!ACEZero:全新SfM革新三维重建!
华科大最新PointDreamer3D纹理重建,清晰如真
能有多牛被300多万人浏览的我问题”对于神经网络,硕士博士不需要弄明白原理,只需要应用,是这样吗?“
20届智能车双车赛题浅浅完个赛吧!
小波变换+CNN完美融合,最新idea发了CV顶会!这思路简直绝了!
清华i人保护协会:社恐可以不去教室上课
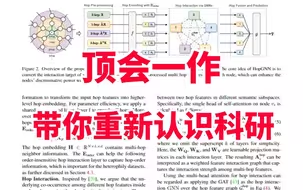
CVPR'24 开源|特征匹配新范式:从语义区域到点的匹配框架
香港大学&南科大!基于强化学习和速度障碍法的多机器人导航
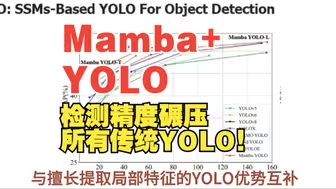
Mamba+YOLO优势互补,检测精度碾压所有传统YOLO!
让NeRF动起来!PhysGaussian:生成任何物体的真实运动!
斯坦福团队EquiBot:仅用 5 分钟演示,机器人就能学会日常操作
ECCV'24开源 | DoubleTake深度估计& 三维重建最强解决方案!
Mamba+YOLO检测精度碾压所有传统YOLO!
如何快速完成顶会论文,计算机专业论文全面讲解,让你在最短的时间能完成自己的论文!零基础小白也能一气呵成的发表论文!-人工智能、计算机、SCI论文、CVPR论文
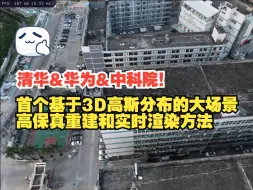
清华&华为&中科院!首个基于3D高斯分布的大场景高保真重建和实时渲染方法
牛津VGG团队最新开源!Flash3D:一张图像重建整个3D场景!通用性超强!
ICLR‘24 Spotlight 首个十亿级别3D通用大模型
[CVPR 2021] 深圳市大数据研究院:根据文本描述进行三维物体定位